










High-speed industrial UAV operations aren’t being defined by who can sprint the fastest anymore. They’re being defined by who can cruise under high load for long enough to finish the mission—without voltage collapse, thermal derating surprises, or premature pack aging.
That shift changes what “performance” means. In 2026, the KPI that increasingly determines long-term ROI in high-speed industrial fleets isn’t peak C-rate. It’s thermal stability and output consistency under sustained load.
Why high-speed UAVs create continuous thermal stress
High-speed flight means sustained, not instantaneous, power demand
Many industrial high-speed missions don’t look like hobby flight profiles (short bursts, big throttle spikes, land, repeat). They look like steady high-load cruise:
BVLOS inspection along linear corridors
long-range mapping with continuous flight lines
emergency response coverage where the aircraft must stay on-station
corridor monitoring where interruption is the failure
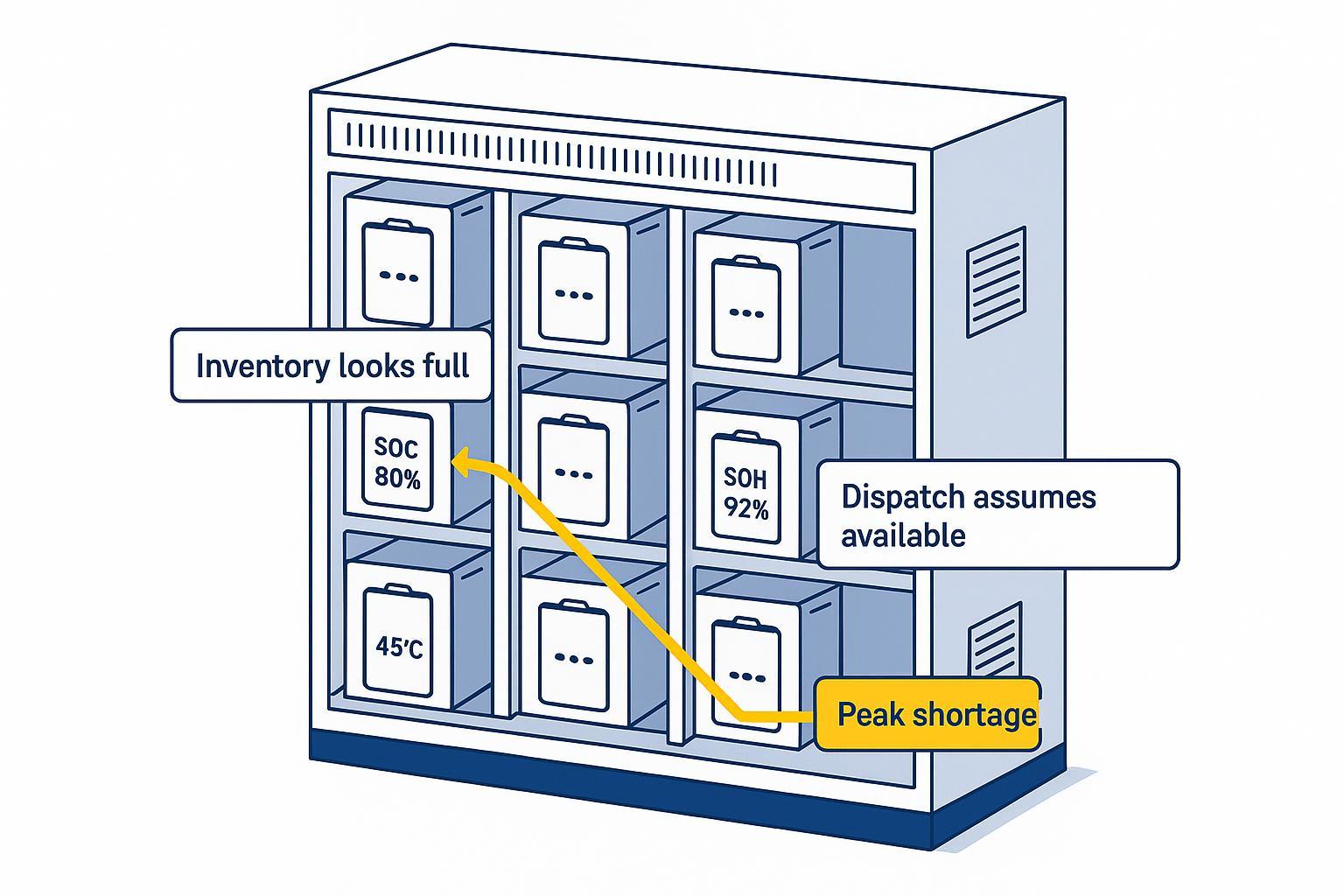
The procurement mistake is subtle: a pack can look “strong” on a spec sheet because it can deliver a high burst current. But industrial missions don’t reward the first 10 seconds. They reward the 40th minute.
Why continuous load creates thermal accumulation
Under sustained load, the system spends less time in recovery. Heat becomes cumulative.
At a simplified level:
Higher current increases resistive losses (I²R), so the battery generates heat continuously.
If the platform can’t reject that heat fast enough, temperature rises over time.
As temperature rises, control systems begin protecting themselves: limiting current, limiting power, or forcing operational changes.
This is where the industry’s “peak mindset” breaks.
In many industrial fleets, these thermal effects don’t show up as immediate failures. They show up gradually: longer cooldown windows, earlier derating events, and increasing mission variability between packs. By the time operators notice dispatch instability, the thermal margin has often been shrinking for months.
In sustained high-speed cruise, the dominant risk is not whether the battery can deliver high power once—it’s whether the system can deliver repeatable power without shrinking safety margins.
The shrinking thermal margin in compact high-speed platforms
High-speed industrial platforms are trending toward lighter structures, tighter packaging, and higher integration density. Those are good trends for aerodynamics and payload capability. But they reduce thermal headroom: less space for heat spreading, fewer options for airflow routing, and higher local heat density around the powertrain.
When thermal margin shrinks, variance becomes expensive. Two packs with the same headline specs can behave very differently in sustained missions if their thermal uniformity and internal resistance distributions are not controlled.
Why peak C-rate is becoming a misleading KPI
Peak C-rate vs sustained operational stability
Peak C-rate (or a marketing “burst rating”) can be useful information—but it’s incomplete.
Sustained high-speed industrial missions care about:
voltage under continuous load
temperature rise over time (ΔT vs time)
how quickly derating occurs
how repeatable that behavior is across packs and across batches
A practical way to frame it:
Burst performance answers: “Can the pack survive a short spike?”
Sustained stability answers: “Can the system finish the mission predictably, every time?”
If your operational model depends on predictability (dispatching, SLAs, maintenance planning), the second question dominates.
What actually determines mission stability under sustained load
Thermal stability, derating boundaries, and what operators actually see
Thermal stability is not about achieving a “cold battery.” It is about stable behavior:
controlled temperature rise rate under sustained load
minimized hotspots (thermal uniformity)
predictable derating boundaries
Derating itself is not a failure; it is a protective design choice. But in real operations, it often shows up as unexpected speed reduction, weaker climb response, or shortened mission range near the end of flight.
A clear general definition of derating—reducing allowable current/power to reduce stress under conditions like high temperature and high C-rate—can be found in EV Reporter’s overview of lithium-ion cell derating vs SOC, C-rate, and temperature.
Voltage sag consistency and payload-level consequences
Voltage sag is the drop in battery voltage when the pack is placed under load. It is closely tied to current and total resistance (internal plus external). A useful first-order framing is ΔV ≈ I × R.
Engineering sources often distinguish an instantaneous ohmic drop from additional polarization-related drop that can deepen under continued load; for a concise explanation, see EverExceed’s discussion of ohmic vs polarization voltage drop.
In a high-speed UAV, sag is not only about flight time. When you’re evaluating voltage sag in drone batteries, the real concern is how sag cascades into system-level stability risks:
flight controller stability (brownout margins and control authority)
payload quality (imaging and LiDAR stability under power fluctuation)
communications continuity (link stability under power constraints)
navigation accuracy (system stability during transient power limitations)
In corridor inspection missions, that instability can mean inconsistent LiDAR data quality or repeated flight segments—both of which turn into schedule slip and rework.
Lifecycle predictability and fleet-level maintenance planning
Sustained thermal stress is not only a safety concern. It’s an economics concern.
In practical fleet terms, repeated high-load thermal exposure tends to show up as internal resistance growth (which worsens sag), widening pack-to-pack variance, earlier onset of derating or reduced usable energy, and less predictable maintenance intervals.
Procurement teams don’t buy a single pack. They buy a fleet behavior distribution. The operational cost comes from the tails: the packs that sag sooner, heat faster, and force conservative dispatch decisions.
How procurement teams should evaluate high-speed UAV batteries
A high-speed UAV pack selection process that stays “audit-friendly” is simple in principle: define the mission, then ask for evidence under those boundary conditions.
What to request (and why):
Mission profile definition: current vs time, payload, ambient range, and airflow assumptions
Continuous discharge evidence: voltage vs time and temperature vs time, not just a burst rating
Derating boundaries: when limiting starts, how it scales, and what thresholds trigger it
Sag characterization: steady-load sag plus transitions, with the internal resistance method stated
Thermal uniformity: hotspot evidence and cell-to-cell/module-to-module temperature spread
Batch consistency: pack-to-pack variance limits, traceability, and QC gates
Two operational translations are worth making explicit:
Predictable charging windows matter most in high-frequency BVLOS schedules, where turnaround time directly affects daily coverage capacity.
Lower variance across packs reduces the number of “problem packs” that force operators to reshuffle missions mid-day.
Why semi-solid is being evaluated for sustained high-speed missions
Under continuous load, what matters is not a headline number. It’s whether the pack can hold thermal uniformity, sag consistency, and predictable derating boundaries as the mission goes long.
That’s why some teams are evaluating semi-solid architectures. Not because the label is trendy—but because it may shift a few trade-offs that matter under sustained thermal stress.
Thermal uniformity under sustained high load
Many “semi-solid” descriptions position the technology as intermediate between conventional liquid-electrolyte lithium-ion and fully solid-state designs; see the general overview of semi-solid-state batteries.
From an evaluator’s perspective, the useful question is not the label. It is:
How uniform is the temperature distribution under sustained load?
How does the pack behave as it approaches thermal limits?
What happens to sag and resistance across cycles?
If a supplier claims improved safety or stability, the credibility comes from test transparency. A good example of what “systematic safety evaluation” should look like can be found in the Royal Society of Chemistry paper on quasi-solid-state lithium battery safety evaluation (2023).
Balancing energy density, stability, and lifecycle performance
In industrial UAVs, “best-in-class” is usually a trap. The real objective is a controlled balance:
energy density that fits mission endurance goals
stability that preserves control margins under sustained load
lifecycle behavior that remains predictable under your duty cycle
If the chemistry or construction improves one axis but worsens variance, the fleet can become harder—not easier—to operate.
What to ask for, regardless of chemistry
If your procurement process is still dominated by the spec sheet, it will keep selecting for peak metrics.
Mission-driven evaluation instead asks for:
a mission profile definition (current draw vs time, ambient range, payload)
continuous discharge curves (voltage and temperature vs time)
derating boundary conditions
documented test method and instrumentation
If you want one principle to carry forward: insist on the boundary conditions. “High C-rate” without method and conditions is not actionable.
If you evaluate against those boundary conditions consistently, you’ll end up with packs that behave more predictably in the field—not just in a lab report.
Building a more predictable high-speed UAV operation model
Why dispatch reliability matters more than maximum speed
In BVLOS and corridor missions, the operational question is simple:
Did the aircraft complete the mission on schedule?
Did it do so without thermal limiting events?
Can we commit to that reliability under the expected environment?
Regulatory attention to BVLOS underscores that these are not casual flights; the FAA BVLOS ARC Final Report (2022) frames BVLOS as a serious operational domain. Oversight and scaling pressure are also reflected in the U.S. DOT OIG report on FAA BVLOS progress (2025).
Speed is only valuable if it’s sustainable.
Reducing downtime through better thermal management
Thermal stability reduces downtime in two ways:
fewer protective events (derating, shutdowns, aborted missions)
more predictable maintenance and replacement planning
Thermal derating is widely used across power electronics to prevent overheating; see a general definition in Mascot’s explanation of temperature derating in power supplies.
The operational implication is straightforward: stable thermal behavior lets your fleet run closer to plan with fewer exceptions. When thermal behavior isn’t stable, you usually pay for it as extra cooldown time, more conservative dispatch decisions, and more spares on hand—even when the aircraft itself is fine.
Using TCO instead of peak specs for procurement decisions
A peak-spec comparison often hides the true cost center: variance and unpredictability.
A TCO lens forces the right questions:
What is the mission completion rate under worst-case ambient?
How often does derating occur—and how early in the mission?
How quickly does sag worsen across cycles?
What is the pack-to-pack variance, and what documentation supports it?
If your vendor cannot provide continuous-discharge test method details (ambient, airflow, instrumentation, cutoff definitions), treat the headline C-rate as non-auditable.
Thermal stability is becoming the real performance metric for high-speed UAVs
Peak discharge capability still matters. But in 2026 industrial high-speed UAV operations, peak capability is increasingly a floor requirement—not the differentiator.
The differentiator is whether the system can sustain high-load cruise with:
controlled thermal behavior
bounded voltage sag
predictable derating boundaries
repeatable fleet-level performance
That is what drives dispatch reliability. And dispatch reliability is what drives TCO.
Industrial UAV battery evaluation checklist for sustained high-speed missions
Use the checklist below as a procurement-ready framework. The goal is not to “pick the highest C-rate.” It is to audit sustained stability under your mission profile, using the same pillars discussed above: mission profile definition, continuous discharge evidence, derating boundaries, sag consistency, thermal uniformity, and pack-to-pack variance.
Categorie | What to request (binary, auditable) | Why it matters in sustained high-speed ops |
|---|---|---|
Mission profile definition | Supplier confirms test mission profile (current vs time, payload, ambient, airflow assumptions) | Prevents spec-sheet mismatch |
Continuous discharge evidence | Continuous discharge curve: voltage vs time and temperature vs time (not just peak) | Shows thermal accumulation and sag progression |
Derating boundaries | Documented derating thresholds and behavior (when limiting starts, how it scales) | Predicts mission interruptions |
Voltage sag characterization | Sag under steady load and under transitions; internal resistance method stated | Sag drives control/payload stability risk |
Thermal uniformity | Hotspot mapping or evidence of temperature distribution (cell-to-cell, module-to-module) | Hotspots drive early degradation and variance |
Batch consistency and traceability | Evidence of pack-to-pack variance limits plus lot traceability and QC gates | Fleet predictability depends on variance and auditability |
If you’re building a sustained high-speed mission battery evaluation plan and need an ODM/OEM partner to align cell + pack architecture, validation methods, and compliance documentation, Herewin can support a mission-profile-driven evaluation process.