











Inspecionar linhas de transmissão de alta tensão com drone (UAV/VANT) — especialmente em 500–800 kV — não é um “voo normal”. O ambiente eletromagnético pode afetar sensores, comunicações e a própria lógica de controle.
Na prática, a interferência eletromagnética (EMI) aparece como instabilidade: a navegação piora, o link oscila e a leitura do sistema de energia deixa de ser confiável.
Este guia é para a fase de avaliação técnica. A pergunta é direta: o sistema de energia do drone (bateria + BMS + integração com o controlador de voo) mantém dados e decisões consistentes sob EMI?
O foco aqui não é prometer “zero interferência”, e sim validar comportamento previsível: quando o sinal degrada, o sistema deve cair para um modo mais conservador de forma controlada — em vez de desligar do nada ou gerar falsos alarmes em série.
Nos próximos tópicos, eu traduzo isso em critérios práticos: o que observar em campo, o que pedir ao fornecedor e como reduzir surpresas operacionais.
Escopo do sistema de energia de UAV para inspeção em 500–800 kV
Em termos práticos: antes de comparar fornecedores, combine exatamente o que você vai cobrar do conjunto bateria + BMS + integração — e o que fica fora do escopo.
Antes de comparar fornecedores, vale fixar o limite do que está sendo avaliado. Nesta estrutura, “sistema de energia” significa:
pack de bateria (células, interconexões e proteção);
BMS (medição, lógica de proteção e registro de eventos);
caminho de potência (conectores, cabos, distribuição e referência de terra);
comunicação BMS ↔ controlador de voo;
Aqui vale ser bem específico: qual é o protocolo, com que frequência os dados são atualizados e o que acontece quando há timeout. Você também precisa saber como o sistema valida dados fora do padrão.
lógica de segurança do controlador que consome os dados do BMS (limites, failsafe e RTH).
E o ponto mais importante de “fronteira”:
EMI não é “um defeito isolado”; é uma restrição de projeto e de integração. O objetivo é demonstrar comportamento previsível dentro de um envelope definido e degradação controlada quando esse envelope é excedido.
Por que falhas ocorrem em inspeção UAV perto de linhas de alta tensão
Perto de linhas e subestações, o drone voa num “ambiente de sinal” bem mais agressivo; o que parece falha de bateria ou de piloto muitas vezes é degradação de sensor, link ou interpretação do sistema.
Em inspeção de transmissão, o drone opera próximo a torres metálicas, condutores energizados e, muitas vezes, subestações — um conjunto que combina:
campos elétricos e magnéticos intensos (dependendo de distância, carga e geometria do vão);
múltiplas fontes de RF (rádio, links de dados, redes locais e interferências industriais);
estruturas metálicas que alteram propagação de sinal e criam zonas de sombra;
exigência de autonomia e repetibilidade (rotas, RTK, georreferenciamento e padrões de segurança).
Para o gestor técnico e de operações, a pergunta relevante não é “quanto tempo a bateria dura em condições ideais”. É outra: o drone se comporta do mesmo jeito, sempre que você repete a missão, mesmo perto de condutores energizados, estruturas metálicas e múltiplas fontes de RF?
Sinais observáveis que devem disparar avaliação de EMI
Em vez de descrições “de campo”, use sinais observáveis que você consegue correlacionar com logs e telemetria:
oscilações intermitentes de link (controle/telemetria/vídeo);
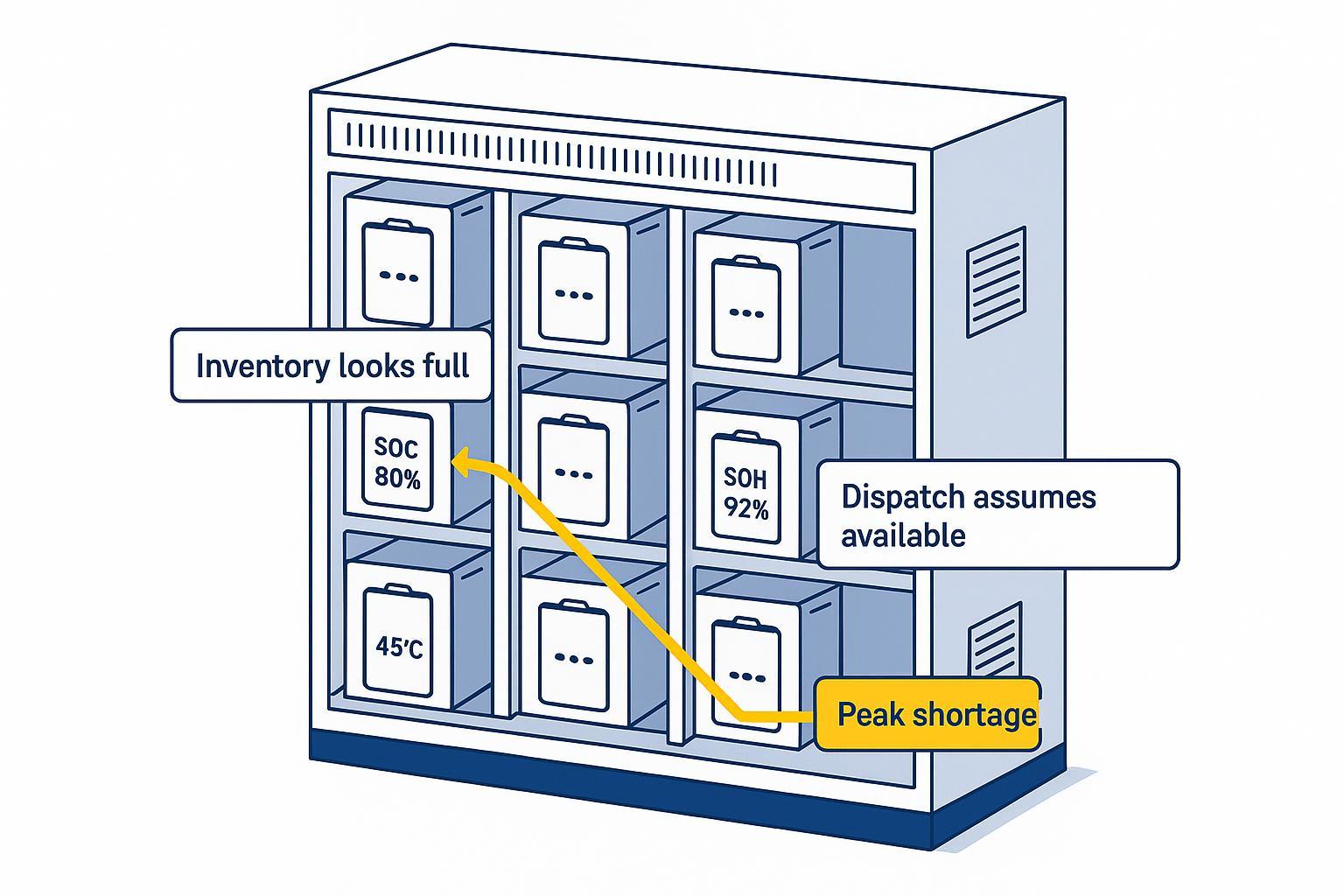
inconsistência entre SOC exibido, tensão e corrente sob a mesma carga;
timeouts/erros na telemetria do BMS;
entrada em modo de segurança sem mudança equivalente nas condições mecânicas (vento/carga/payload).
A leitura correta para a avaliação é: quando esses sinais aparecem em zonas recorrentes do corredor, o risco está na interpretação do sistema (sensores + comunicação + BMS + lógica do controlador), não apenas na “capacidade” da bateria.
Por que o comportamento do drone muda perto de linhas de 500kV a 800kV
Perto de UHV, o que muda é o ambiente de sinal que alimenta três pilares do voo:
navegação (GNSS/RTK, compasso/magnetômetro, estimativa de atitude e posição);
comunicação (controle, telemetria e vídeo);
energia (medição, proteção e lógica de desligamento do pack — via BMS).
Quando um desses pilares degrada, o software tenta “se proteger” com failsafes (RTH, pairar, pouso). O problema: se a percepção está errada, o failsafe pode piorar a situação.
Como pequenas instabilidades se tornam risco operacional em inspeções críticas
Um evento pequeno (ex.: perda momentânea de telemetria) pode virar um evento grande quando entra numa sequência.
Primeiro vem a interferência. Depois, a leitura fica instável. Aí o sistema toma uma decisão automática (troca de modo, limitação de potência ou retorno). Quando você percebe, perdeu a janela de inspeção. E isso costuma terminar em revoo, custo extra e mais risco acumulado.
Em contratos de inspeção, isso vira risco de SLA e risco de ativo (drone, payload, e o próprio ativo energizado ao redor).
Quais são os sinais de interferência eletromagnética durante inspeções com drones
EMI quase nunca aparece como um alarme único; ela aparece como inconsistência repetível em telemetria, logs e mudanças de modo.
Na prática, a EMI raramente aparece como “um alarme claro”. Ela aparece como inconsistência: comportamento que não fecha com a condição real da aeronave.
Como você já viu os sinais observáveis, aqui a pergunta muda para avaliação: que evidências devem aparecer nos registros de voo para sustentar (ou refutar) a hipótese de EMI?
Link e comunicação: o que verificar em telemetria e registros
Em vez de “perda de sinal” como descrição, busque padrões verificáveis:
logs de link/rádio/telemetria: quedas curtas recorrentes no mesmo trecho do corredor, aumento de erros de enlace e degradação de taxa de atualização;
log de vídeo/stream (se aplicável): congelamentos sincronizados com a zona do corredor, não com variação de distância ao piloto;
carimbo de tempo: correlação entre quedas e eventos de modo (failsafe/RTH/limitação).
O critério útil é reprodutibilidade: se o padrão aparece em pontos geográficos semelhantes, trate como hipótese forte de ambiente (propagação/EMI), não apenas de “alcance”.
Energia e BMS: como diferenciar queda real de leitura degradada
Quando o operador reporta SOC/tensão “saltando”, a avaliação deve procurar:
telemetria do BMS: amostras com ruído/transientes, inconsistência entre tensão/corrente/SOC sob carga semelhante e erros de comunicação (frames inválidos/timeout);
eventos/trips do BMS: qual proteção foi acionada, por quanto tempo, e se houve “travamento” de falha por política de segurança;
coerência com o perfil de carga: se a corrente e a potência não explicam a queda de tensão exibida, priorize hipótese de medição/comunicação degradada.
O objetivo é decidir se houve subtensão real (energia insuficiente) ou subtensão aparente (dado degradado gerando decisão incorreta).
Failsafe e mudanças de modo: evidência mínima para atribuir a EMI
Para evitar atribuições frágeis (“o drone enlouqueceu”), alinhe a evidência:
log do controlador de voo: qual condição disparou o failsafe (link, GNSS, compasso, bateria), e qual foi a sequência de eventos;
consistência entre sensores: por exemplo, degradação de heading/posição na mesma zona em que o link oscila;
regra de degradação: se o sistema alterna entre modos repetidamente, isso é sinal de dados limítrofes — o que reforça a necessidade de uma política de degradação controlada.
Para tomada de decisão, o que interessa é: o sistema registra evidência suficiente para explicar a decisão automática e permitir auditoria.
Como a interferência eletromagnética afeta sistemas de drones em ambientes de alta tensão
O ponto-chave: você não precisa “virar especialista em EMC” para tomar uma boa decisão. Basta entender por onde a interferência entra e como isso vira sintomas observáveis em telemetria e logs.
A explicação abaixo é deliberadamente “de sistema”: o suficiente para conectar causa → sintoma → evidência, sem virar um tratado de EMC.
Como o ambiente eletromagnético afeta controle e comunicação
Para fins de avaliação, pense na EMI como dois caminhos de entrada:
radiada: acopla “pelo ar” em antenas, cabos e carcaça;
conduzida: entra pelos condutores — cabos, conectores e retorno de terra.
O que importa na prática é o que você consegue verificar:
mais erros/timeout em links de controle, telemetria e vídeo;
viés ou instabilidade em sensores (especialmente magnetômetro);
piora na estimativa de posição/heading, com impacto em modos de voo.
Como referência operacional, o guia de interferência magnética do ArduPilot ajuda a conectar sintomas a causas (loops de corrente, caminho de retorno e posicionamento de sensores) — útil para revisar o setup do veículo durante a avaliação.
Por que o BMS pode interpretar dados de forma incorreta em campo eletromagnético forte
Um BMS industrial toma decisões com base em medições e estados. Quando EMI entra no caminho, ele pode “ver” falhas que não existem.
Falhas típicas induzidas por interferência:
ruído em linhas de sense (tensão de célula/pack): aparenta sobretensão/subtensão;
referência de terra instável (common-impedance / ground bounce): desloca leituras em bloco;
comunicação corrompida (ex.: dados para o controlador de voo): cria timeouts e estados inválidos;
transientes que cruzam thresholds: disparam proteções por milissegundos, mas com lógica que “trava” a falha para segurança.
Isso explica a frase de abertura: a bateria pode estar íntegra, mas o sistema decide como se estivesse em falha.
Interação entre sistema de voo e sistema de energia sob interferência
A interação crítica (e muitas vezes subestimada) é:
BMS mede e publica estado (SOC, tensão, corrente, temperatura, falhas).
Controlador de voo usa esses dados para limites de potência, failsafe e retorno.
Sob EMI, os dados podem degradar.
O controlador faz a coisa “certa” para um dado “errado”.
Em decisão de compra, isso muda o foco de “bateria com mais Wh” para “arquitetura de energia que mantém integridade de medição e comunicação sob EMI”.
Quais riscos operacionais a EMI pode causar em inspeções de linhas de transmissão
Aqui a conversa sai de engenharia pura e vira risco: se a interferência torna o comportamento menos previsível, você aumenta revoos, incidentes e custo por missão.
Interrupção de missão durante inspeções críticas de infraestrutura elétrica
Risco direto:
perda de janela de inspeção;
revoos (custo e exposição repetida);
inconsistência de dados (piora do valor do relatório);
atraso de cronograma em projetos com penalidades.
Quando a missão é BVLOS ou tem janela curta, a interrupção pesa mais que a perda de alguns minutos de autonomia.
Risco de perda do drone próximo a estruturas de alta tensão
A consequência mais cara não é “um susto”. É:
perda do drone e do payload;
risco de incidente perto de ativo energizado;
investigação, paralisação e impacto reputacional;
aumento de prêmio de seguro e exigência de mitigação documentada.
Atrasos operacionais e impacto em contratos de inspeção e SLA
SLA em inspeção é, na prática, previsibilidade:
previsibilidade de completar missões;
previsibilidade de qualidade do dado;
previsibilidade de custo por km/torre;
previsibilidade de incidentes.
EMI é um “multiplicador” porque cria eventos de baixa previsibilidade.
Em inspeção de linhas de transmissão UHV, a discussão de confiabilidade sob interferência eletromagnética (EMI) não é apenas “qual bateria”. É “o sistema tem imunidade e comportamento previsível sob interferência?”.
Como sistemas de BMS industrial ajudam a reduzir interferência eletromagnética em drones de inspeção
A ideia é separar o que é “truque” de engenharia do que é arquitetura: um BMS mais robusto não elimina EMI, mas reduz falsos positivos e mantém o sistema auditável quando o sinal degrada.
Aqui o objetivo é separar “medidas cosméticas” de arquitetura robusta.
Proteção eletromagnética e isolamento de componentes sensíveis
Em termos de engenharia, reduzir EMI não é um único componente. É um conjunto:
blindagem onde faz sentido (enclosure, módulos sensíveis);
aterramento/bonding com baixa impedância e estratégia consistente;
filtros em pontos de entrada (conectores) para evitar que ruído chegue ao ADC e ao MCU;
roteamento e segregação de cabos (evitar loops e acoplamento com cabos de potência).
O material técnico da ECT sobre blindagem e layout para EMC/EMI é útil como referência de princípios: não basta “colocar uma malha”; a terminação e o caminho de retorno decidem se o shield protege ou vira antena.
Arquitetura de comunicação isolada para maior estabilidade do sistema
Se o problema é “dado errado vira decisão errada”, a prioridade é integridade de comunicação.
Uma arquitetura mais robusta tende a incluir:
comunicação diferencial e/ou isolada entre subsistemas;
proteção contra timeouts e validação de dados (sanity checks);
estratégia de fail-safe que considere “sensores degradados” (e não apenas “bateria baixa”).
Para quem precisa alinhar BMS e controlador de voo, vale revisar o artigo da Herewin sobre protocolos de comunicação de bateria UAV e integração BMS + controlador de voo para entender quais dados circulam e onde a cadeia pode quebrar.
Diferença entre BMS industrial e sistemas convencionais em ambientes críticos
O que separar na prática:
BMS “convencional” frequentemente é pensado para consumo geral (menos exigência de imunidade);
BMS industrial é avaliado por:
estabilidade de leitura sob ruído;
comportamento de proteção sem falsos positivos frequentes;
rastreabilidade (logs/eventos);
documentação de testes.
Um bom ponto de partida (conceitual) é a própria explicação de “papel do BMS” e das proteções no material da Herewin sobre BMS em baterias de drone. O que você deve exigir na compra é o “como validar”, não apenas “o que ele promete”.
Critérios de validação: como traduzir EMI em requisitos verificáveis
Você não precisa (e não deve) “inventar” certificações no RFP. Você precisa pedir evidência.
Dois padrões bem conhecidos em imunidade EMC ajudam a organizar o pensamento:
RF irradiada (interferência “no ar”), como definido na IEC 61000-4-3;
RF conduzida (interferência “nos cabos”), como definido na IEC 61000-4-6.
A forma correta de usar isso em compra é pedir:
quais testes de imunidade foram executados (método, níveis, configuração);
quais falhas ocorreram e como foram mitigadas;
quais logs/eventos o sistema registra para auditoria;
como o sistema se comporta sob perda temporária de dados (degradação controlada vs shutdown abrupto).
Por que a confiabilidade do sistema de energia reduz riscos e melhora a eficiência das inspeções
No fim, confiabilidade do sistema de energia significa menos surpresa em campo: menos abortos de missão, mais previsibilidade e diagnósticos mais rápidos quando algo foge do padrão.
Menos falhas de missão em ambientes de alta tensão
Uma arquitetura de energia robusta reduz falhas por dois caminhos:
reduz o número de “eventos falsos” (menos trips por ruído);
melhora a capacidade de diagnosticar e isolar causa (menos tempo em troubleshooting cego).
Isso é diferente de “mais autonomia”. É menos interrupção e menos revoo.
Maior previsibilidade em operações de inspeção de infraestrutura crítica
Previsibilidade é o que você consegue defender em auditoria e em contrato:
o que foi testado;
quais limites existem;
como o sistema falha (falha segura) quando o ambiente excede o esperado.
Redução de risco operacional e proteção de ativos durante inspeções
Abaixo está um modelo simples (exemplo) para justificar investimento em confiabilidade.
Exemplo de suposição (para seu próprio cálculo)
Custo esperado anual por incidentes de EMI =
N_incidentes × C_médio_por_incidenteBenefício anual da mitigação =
redução_estimada(%) × custo esperado anual
Onde C_médio_por_incidente pode incluir:
perda/recuperação de drone/payload;
revoo e equipe;
atraso contratual;
franquia/seguro;
investigação e paralisação.
Se você não consegue estimar esses itens, o caminho correto é o mesmo: pedir logs e evidências para reduzir incerteza.
Como transformar EMI em requisitos verificáveis no RFP
Para transformar EMI em requisitos verificáveis, evite pedidos genéricos (“precisa ser robusto”). Prefira critérios Pass/Fail e artefatos de validação que o fornecedor consegue entregar — e que você consegue auditar.
Use esta seção como “lista do que pedir” ao fornecedor. Em seguida, a checklist transforma isso em perguntas Sim/Não para comparar propostas.
Evidências típicas (ajuste ao seu RFP):
relatório de ensaio (ou plano de ensaio) com configuração, níveis e critérios de aceitação;
descrição do envelope operacional e de degradação controlada (o que o sistema faz quando dados ficam inconsistentes);
documentação do protocolo BMS ↔ controlador de voo (campos, taxa de atualização, timeout, estados de falha);
exemplo de logs/eventos do BMS (estrutura, timestamps, códigos) e procedimento de extração em campo;
matriz de falhas: quais trips existem, thresholds, filtros e como falsos positivos são reduzidos.
Checklist técnico (RFP)
A seção acima define quais evidências pedir ao fornecedor. A lista abaixo transforma isso em itens Sim/Não para especificação, rastreabilidade e comparação entre propostas.
A) Evidência e rastreabilidade
O fornecedor fornece logs de eventos do BMS (falhas, trips, motivos) com timestamp?
Existe registro de dados mínimos: tensão, corrente, temperatura, SOC, códigos de falha?
Há procedimento de extração de logs em campo (sem bancada complexa)?
B) Integridade de medição sob ruído
Linhas de sense (tensão/temperatura) usam práticas de mitigação (roteamento, filtragem, blindagem) documentadas?
Há estratégia explícita para reduzir falsos positivos de proteção sob transientes?
C) Comunicação BMS ↔ controlador de voo
O protocolo de comunicação é documentado (campos, atualização, timeout, comportamento em falha)?
Existe estratégia de degradação controlada quando dados ficam inconsistentes (em vez de shutdown abrupto)?
D) EMC/EMI: validação e limites
O fornecedor consegue descrever testes de imunidade relevantes (método e configuração), alinhados a conceitos como RF irradiada e conduzida?
O fornecedor descreve claramente limites conhecidos (onde o sistema pode degradar)?
E) Operação e segurança
Há recomendações claras de operação em zonas de alta interferência (SOP: critérios de aborto, modo manual, etc.)?
O sistema suporta inspeção com payloads típicos (RGB/termal/LiDAR) sem comportamento imprevisível?
Próximos passos
Se você quiser, a equipe da ヘレウィン pode ajudar a revisar seu RFP e transformar seus requisitos em itens auditáveis (interface BMS ↔ controlador de voo, critérios de logs e limites de operação em ambiente de EMI).