











In industrial drone operations, charging is no longer a simple power transfer process.
For operators using 28S–32S high-voltage battery systems, the battery and charger must continuously exchange data before and during charging. Without this communication, many charging systems will refuse to start altogether.
At first glance, this may seem unnecessarily complex compared with conventional drone batteries that can be connected directly to a charger. In reality, communication between the Battery Management System (BMS) and the charger is what makes high-voltage drone batteries safe, reliable, and commercially viable.
Many field issues—including charging failures, unexpected shutdowns, overheating events, rapid capacity degradation, shortened battery lifespan, and abnormal charging behavior—can often be traced back to communication problems between the battery and charger.
As industrial UAV platforms become larger and more power-intensive, battery charging is increasingly becoming a control problem rather than a simple electrical process.
This article explains why charger communication is essential in modern 28S–32S drone battery systems and how it affects safety, battery lifespan, charging efficiency, and operational uptime.
Understanding 28S–32S High-Voltage Drone Batteries
The “S” in a battery specification refers to the number of cells connected in series.
A 28S battery contains 28 lithium cells connected in series, while a 32S battery contains 32 cells. Using a nominal cell voltage of 3.7V:
- 28S battery: approximately 103.6V nominal voltage
- 32S battery: approximately 118.4V nominal voltage
These voltage levels place the battery firmly within the category of industrial high-voltage energy systems.
Compared with lower-voltage drone batteries, high-voltage architectures provide several operational advantages:
- Higher power delivery capability
- Lower current requirements for the same power output
- Reduced energy loss throughout the system
- Improved efficiency under heavy loads
- Longer flight endurance
- Better support for large industrial UAV platforms
As a result, 28S–32S battery systems are increasingly used in:
- Agricultural spraying drones
- Surveying and mapping UAVs
- Powerline inspection drones
- Emergency response aircraft
- Heavy-lift logistics drones
Unlike conventional battery packs, these systems typically integrate an advanced Battery Management System (BMS) that continuously monitors battery condition and manages charging and discharging behavior in real time.
Many industrial-grade batteries in this voltage range also achieve significantly higher energy density than traditional drone batteries, enabling longer flight times and greater payload capability without proportionally increasing battery weight.
The Charger Is No Longer Just a Power Supply
With lower-voltage drone batteries, a charger primarily provides regulated voltage and current.
High-voltage smart battery systems operate differently.
In a 28S–32S architecture, the charger functions as part of a coordinated energy management system. Rather than blindly supplying power, it works together with the battery’s BMS to determine:
- Whether charging is permitted
- What charging voltage should be applied
- How much charging current can be safely delivered
- When charging power should be reduced
- When charging should stop completely
The charger therefore acts less like a standalone power source and more like an execution device operating under continuously updated instructions from the battery.
Without this coordination, charging a high-voltage battery would involve unacceptable safety, reliability, and battery-life risks.
Why Communication Between the BMS and Charger Is Necessary
1. Safety Protection
Safety is the primary reason communication exists.
A fully charged 32S battery can exceed 130V. At this voltage level, charging errors become significantly more serious than they are in lower-voltage battery systems.
Before charging begins, the BMS communicates critical information to the charger, including:
- Total pack voltage
- Individual cell voltages
- Temperature conditions
- Charging permissions
- Maximum allowable charging current
- Maximum allowable charging voltage
The charger then adjusts its output according to the battery’s real-time condition.
This communication process helps prevent:
- Overcharging
- Overvoltage conditions
- Excessive charging current
- Charging at unsafe temperatures
- Thermal runaway risks
Without communication, the charger would effectively be operating blind, unable to determine whether the battery is actually capable of safely accepting power.
2. Battery Life Optimization
A battery’s charging requirements change throughout its lifecycle.
As batteries age:
- Internal resistance increases
- Available capacity gradually decreases
- Heat generation rises
- Fast-charging tolerance declines
A fixed charging profile cannot account for these changes.
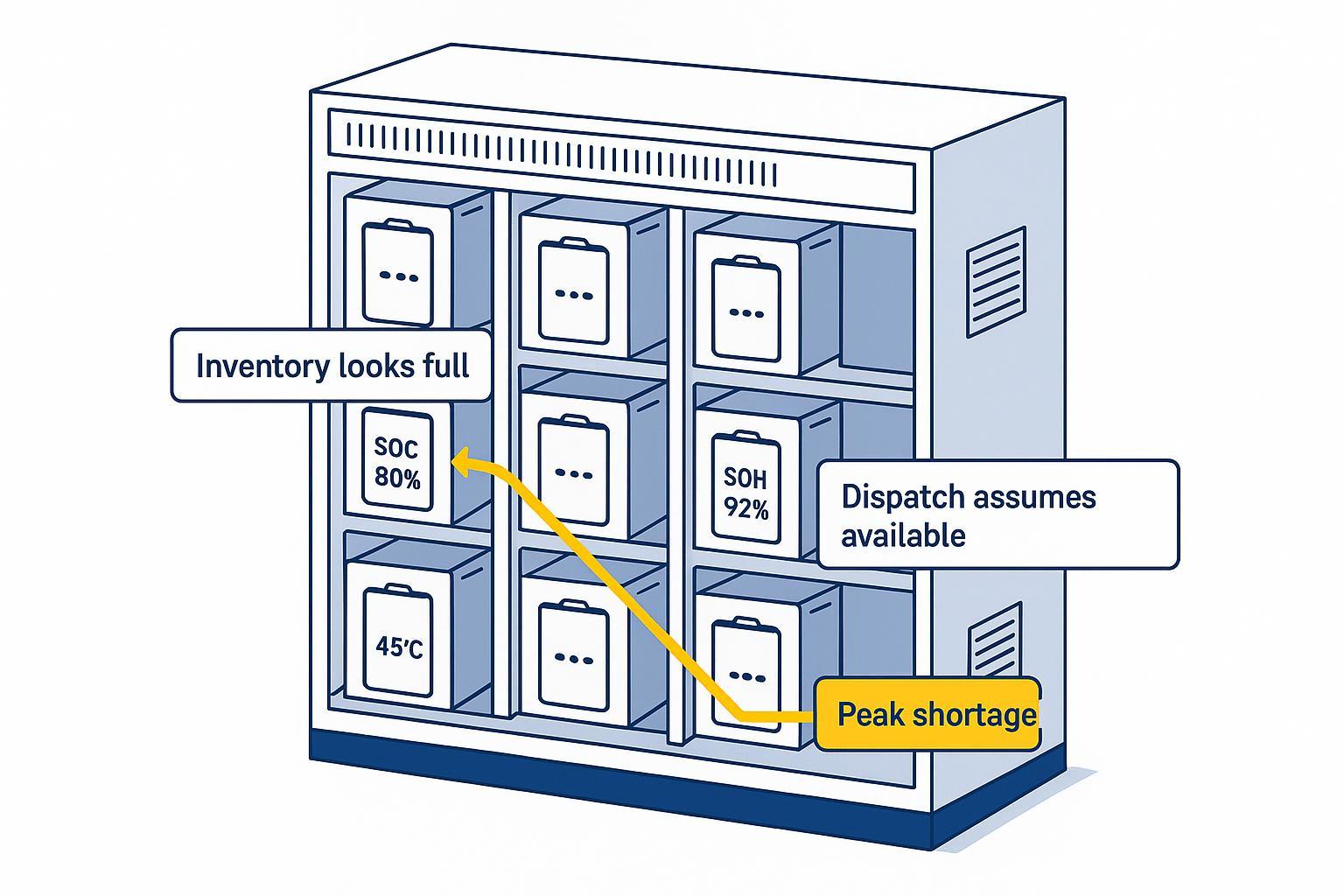
Through continuous communication, the BMS provides battery health information to the charger, including:
- State of Charge (SOC)
- State of Health (SOH)
- Cycle count
- Internal resistance trends
- Historical operating conditions
The charger can then modify charging behavior accordingly.
A healthy battery may safely accept higher charging power, while an older battery may require a more conservative charging profile to reduce additional stress.
This adaptive charging approach helps extend service life and maintain long-term performance.
3. Charging Efficiency and Operational Uptime
Communication also improves charging efficiency.
Not every battery can safely accept maximum charging power at every moment.
For example:
- Low-temperature batteries may require reduced charging current.
- Elevated battery temperatures may require temporary power reduction.
- Batteries approaching full charge require current tapering.
- Aged batteries may require lower charging rates than new batteries.
By continuously exchanging information, the charger can operate at the highest safe charging rate available under current conditions.
For commercial drone fleets, reducing charging bottlenecks directly improves aircraft availability, mission turnaround time, and overall operational productivity.
Fast Charging vs Standard Charging in High-Voltage Drone Systems
Industrial drone charging systems generally support both fast-charging and standard-charging modes.
Fast charging is designed for time-critical operations such as emergency response missions, utility inspections, disaster assessment, or large-scale surveying projects where aircraft availability directly impacts productivity.
Depending on battery design and charger capability, a high-voltage battery may reach approximately 80% charge within 30–40 minutes.
However, higher charging currents also increase:
- Cell polarization
- Internal heat generation
- Electrochemical stress
- Long-term degradation rates
Repeated use of aggressive fast charging can accelerate capacity loss and increase internal resistance over time.
Standard charging typically operates at lower charging currents and longer charging durations. While slower, this approach reduces thermal stress and helps preserve battery chemistry, supporting longer cycle life and more predictable long-term performance.
For most routine fleet operations, standard charging remains the preferred approach whenever operational schedules allow.
Modern smart charging systems use communication between the BMS and charger to balance charging speed and battery longevity according to real-time operating conditions.
What Does the BMS Actually Monitor?
The Battery Management System serves as the intelligence layer of a smart drone battery.
In a 28S–32S battery pack, the BMS continuously monitors:
- Pack voltage
- Individual cell voltages
- Charge and discharge current
- Battery temperature
- State of Charge (SOC)
- State of Health (SOH)
Monitoring individual cell voltage is particularly important.
A high-voltage battery contains dozens of cells connected in series. Even small variations between cells can gradually reduce pack performance or create safety risks if left unmanaged.
The BMS also supervises:
- Overvoltage protection
- Undervoltage protection
- Overcurrent protection
- Overtemperature protection
- Charge management
- Discharge management
These functions enable the battery to operate safely across a wide range of environmental and operational conditions.
Without these protections, reliable operation of a 100V+ drone battery would be difficult to achieve in demanding industrial environments.
Why Cell Balancing Matters in 28S–32S Batteries
One challenge unique to high-series battery architectures is cell imbalance.
Even when cells are manufactured to the same specifications, small differences in capacity, resistance, temperature exposure, and aging behavior gradually appear over hundreds of charging cycles.
Without balancing, the weakest cell eventually limits the performance of the entire battery pack.
A single cell reaching its voltage limit early can force charging to stop before the rest of the pack reaches full capacity. Likewise, a weak cell can trigger low-voltage protection earlier during discharge, reducing available flight time.
The BMS addresses this challenge through cell-balancing strategies.
Depending on battery design, balancing may be:
- Passive balancing
- Active balancing
By minimizing voltage deviation between cells, balancing helps:
- Improve usable battery capacity
- Maintain charging consistency
- Enhance safety margins
- Extend overall battery lifespan
For large high-voltage battery packs, balancing is not simply a performance feature—it is a fundamental requirement for long-term reliability.
What Information Is Exchanged During Charging?
Communication between the battery and charger revolves around several critical parameters.
Voltage Verification
Voltage control is one of the most important aspects of charging a high-voltage battery.
If charging voltage is too high:
- Cell damage may occur
- Electrolyte degradation can accelerate
- Swelling risks increase
- Thermal events become more likely
If charging voltage is too low:
- The battery may never reach full capacity
- Available flight time decreases
- Long-term performance may suffer
Before charging begins, the BMS communicates the battery’s acceptable voltage range and charging limits.
The charger then dynamically adjusts output voltage to match those requirements.
Throughout the charging process, voltage parameters continue to be monitored and updated in real time.
Current Verification
Charging current directly affects both charging speed and battery stress.
Higher current can reduce charging time but also increases:
- Heat generation
- Cell polarization
- Internal degradation
The BMS continuously evaluates battery condition and communicates the maximum safe charging current.
Factors influencing this limit include:
- Battery temperature
- State of charge
- Cell balance condition
- Internal resistance
- Battery age
- Health status
The charger then adjusts current output accordingly.
As charging progresses and battery voltage rises, charging current is gradually reduced to maintain safety and battery longevity.
State of Charge (SOC)
SOC represents the battery’s remaining available energy.
Using current measurements, voltage data, and compensation algorithms, the BMS continuously estimates the battery’s charge level and shares this information with the charger.
The charger uses SOC information to determine the appropriate charging stage.
Generally:
- Low SOC supports higher charging power
- Medium SOC requires controlled charging
- High SOC requires current reduction and voltage stabilization
This approach helps balance charging speed and battery protection.
State of Health (SOH)
SOH represents the battery’s overall condition relative to its original design performance.
As batteries age, charging behavior often needs adjustment.
The BMS evaluates SOH based on factors such as:
- Capacity retention
- Internal resistance changes
- Charge-discharge history
- Cycle count
For batteries showing significant aging, the charger may automatically apply more conservative charging parameters.
This helps reduce stress on aging cells and slow further degradation.
Why Manual Charging Parameters Become Impractical Above 100V
At lower voltages, experienced operators can manually configure charging parameters with reasonable success.
Industrial high-voltage battery systems are fundamentally different.
A 28S–32S battery pack contains dozens of cells whose charging requirements continuously change according to:
- Temperature
- State of charge
- Cell balance condition
- Internal resistance
- Battery age
- Previous operating history
These variables can change throughout the charging process itself.
No operator can realistically monitor and adjust charging parameters with the speed and precision required to safely manage a modern high-voltage battery pack.
Real-world industrial UAV operations further increase complexity. Batteries may be charged in remote locations, exposed to varying ambient temperatures, subjected to intensive duty cycles, and rotated across multiple aircraft.
Under these conditions, manually configured charging profiles become increasingly impractical.
For this reason, charging has evolved from a manually configured process into a real-time control system driven by communication between the battery and charger.
In practice, the charger is no longer making charging decisions independently; it is executing charging instructions based on information continuously provided by the BMS.
The Future of High-Voltage Drone Charging
As industrial UAV platforms continue to scale, battery charging systems are evolving beyond basic power delivery.
Future developments are expected to include:
- Higher energy-density battery architectures
- Faster charging capabilities
- Smarter battery health prediction
- AI-assisted charging optimization
- Cloud-connected fleet battery management
- Automated charging stations
- Predictive maintenance based on battery analytics
The level of integration between batteries, chargers, aircraft, and fleet management systems will continue to increase.
Future charging systems may be capable of automatically identifying battery condition, predicting service requirements, optimizing charging schedules, and reducing maintenance intervention throughout the battery lifecycle.
For large-scale drone operations, battery communication is no longer merely a safety feature—it is becoming a foundational layer of operational infrastructure, directly influencing fleet productivity, reliability, and total cost of ownership.
As industrial UAV operations continue to scale, charging is evolving from a simple power-delivery process into an intelligent control system where real-time data exchange between the battery and charger becomes essential for safe and efficient fleet-level energy management.