










In low-altitude aviation, the engineering conversation is changing in a subtle but telling way.
Teams still care about rotors, airframes, and flight-control software. But when programs move from a few flights to a daily schedule, the same question keeps resurfacing: can the aircraft fly again—reliably, repeatedly, and across a fleet?
That’s where the energy system becomes the constraint. Not “battery chemistry” in the abstract, but battery architecture for eVTOL and heavy-lift platforms: voltage level, redundancy, thermal containment, telemetry, charging and turnaround, and the evidence package that proves performance is predictable at scale.
This article focuses on one idea: as operations scale, batteries behave less like components and more like infrastructure. If you’re specifying packs for heavy cargo drones or defining eVTOL battery requirements, the goal isn’t just more Wh/kg—it’s operational predictability under peak power, thermal cycling, and real-world variance.
Why low-altitude aviation is entering a new energy bottleneck phase
eVTOL and heavy-lift drones are no longer demo-scale systems
Early prototypes can tolerate a lot: hand-picked packs, intensive inspection, conservative mission envelopes, and engineers in the loop.
Scaled operations can’t. Once you have multiple aircraft, multiple charging points, and real dispatch pressure, the battery stops being a component and starts behaving like infrastructure.
In practice, the scaling inflection tends to show up as:
battery thermal recovery time becoming part of turnaround time
nuisance protection events becoming flight-schedule events
unit-to-unit variance becoming operational variance
documentation gaps becoming program delays
Mission profiles are becoming structurally more demanding
Two trends are compounding:
Payload, range, and sortie frequency are all rising together.
Mission phases are getting more “peaky”: vertical segments, hover, climb transients, and aggressive gust rejection.
Oak Ridge National Laboratory captures why this is fundamentally different from a steady-drain EV duty cycle. In its 2024 analysis of eVTOL batteries, ORNL notes that flight stages like climb, hover, and descent demand varying power, with some phases requiring high bursts of power and rapid current draw (ORNL, 2024).
Why flight performance is no longer the primary constraint
Aerodynamics, propulsion efficiency, and flight control still matter. They’re not where many programs stall.The stall happens when the mission transitions from a single flight to a daily operating cycle:
peak power pulls trigger voltage sag and thermal spikes
fast turnaround pulls trigger charging heat and accelerated aging
certification and safety cases pull trigger containment, traceability, and test evidence
At that point, “more Wh/kg” stops being a plan. Architecture becomes the plan.
What actually limits eVTOL battery requirements and heavy-lift drone performance today
Here’s the simplest way to frame today’s limits: in vertical flight, batteries don’t fail because of one headline spec. They fail when energy, heat, and voltage stability collide in the same few minutes.
The three core constraints: energy, thermal, and voltage stability
1) Usable energy (not nameplate energy).
Wh/kg is easy to compare, but aircraft dispatchability depends on the energy you can actually access inside the allowed temperature and voltage window.
2) Thermal behavior under mission cycling.
Thermal isn’t only a “max temperature” problem. It’s the shape of the cycle: high-current takeoff/hover/climb, limited cooling in cruise, then heat soak plus charge heat during turnaround.
3) Voltage stability under peak load.
Voltage sag is a safety margin issue, not a nuisance. Peak-load events—takeoff/hover, gust rejection, heavy-load transitions, emergency maneuvers—can push motor controllers toward undervoltage/current limits, reduce thrust margin, and force the BMS closer to protective thresholds.
Energy tells you how long you can fly, thermal tells you how often you can fly, and voltage stability tells you how safely you can fly at the worst moments.
Why these constraints only show up in real operations
A pack can look “high energy” on paper and still fail the mission if it can’t hold voltage during bursts, or if it heats fast enough that protection events end the sortie early.
This is also why “fast charge capability” is not one line item. Fast charging becomes accelerated aging unless the architecture (cooling, sensor placement, BMS controls, SOC-window strategy) is designed around repeated turnaround cycles.
Engineering matrix
Mission phase | Dominant constraint signal | What you actually need to design for (architecture level) |
|---|---|---|
Takeoff / hover | Peak power + sag | Higher bus voltage (where appropriate), lower impedance interconnects, parallelization strategy, defined burst limits and recovery behavior |
Climb | Thermal accumulation | Cooling paths designed for peak segments, sensor placement that catches hotspots, BMS limits tied to real thermal gradients |
Cruise | Usable energy window | SOC strategy that preserves reserve, efficiency of power electronics, stability of pack voltage over time |
Descent / landing | Control margin + recovery | Predictable voltage response, safe regen handling (if applicable), thermal headroom for the next turnaround |
Turnaround (charge/swap) | Heat + schedule pressure | Charge acceptance with thermal management, swap-friendly mechanical/electrical interfaces, fast health checks and traceable logs |
Multi-sortie day | Degradation slope | Mission-profile cycling validation, consistency across packs, change-control on cells/process/BMS firmware |
From battery cells to energy architecture: the real system shift
At scale, battery systems behave less like components and more like distributed power networks.
Why battery limitations only emerge at system scale
A single cell can look excellent. But a pack is where coupling shows up—and where small design choices start to look like system behavior:
resistance distribution creates hotspots
module-to-module variation creates imbalance
sensor placement determines what the BMS can “see”
interconnect design determines how much loss becomes heat
Once you add redundancy, isolation monitoring, contactors, precharge, and harnessing, the battery stops being “a box of cells.” It becomes an engineered power network with failure modes you have to manage explicitly.
Why single-pack thinking no longer works in operational fleets
Single-pack thinking assumes one asset, one mission, one charger. That’s fine for demos.Fleet thinking introduces requirements that are less about “max performance” and more about repeatability:
predictable turnaround time
predictable thermal recovery
standardized interfaces for swapping or maintenance
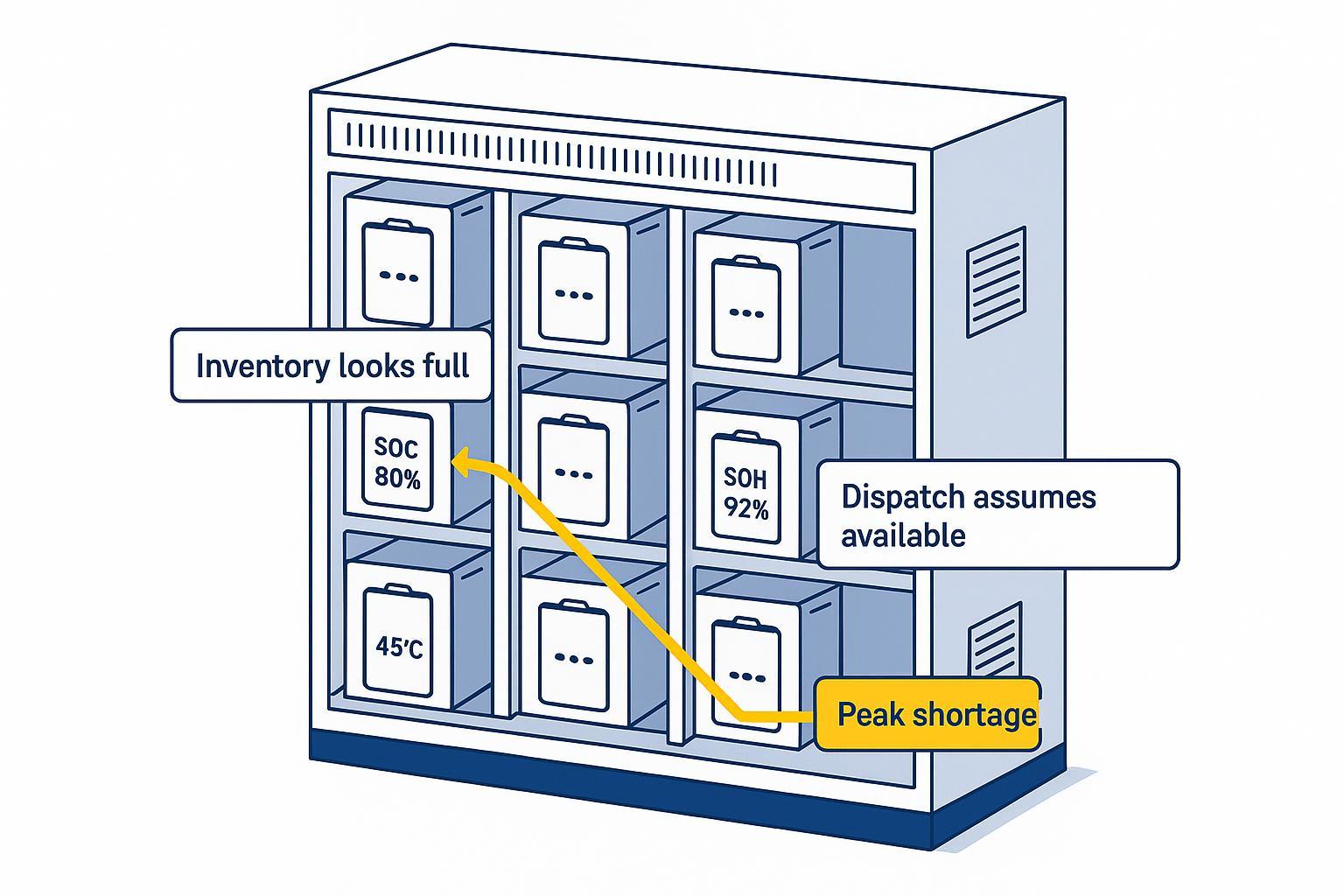
data consistency so operations can trust SOC/SOH across aircraft
Wrap it up in one sentence: if the energy system can’t behave deterministically, the fleet can’t schedule deterministically.
Voltage architecture and why 12S–18S is becoming an operational band
For heavy multirotor drones, 12S–18S-class packs often represent a practical operational band: they’re common, they’re serviceable, and the ecosystem of motors, ESCs, and charging infrastructure supports them.
But there’s an important caveat.
As power levels and safety requirements rise, many eVTOL architectures move toward much higher bus voltages to reduce current, cabling mass, and I²R losses. NASA’s redundancy architecture study for an all-electric eVTOL quadrotor models a battery-backed 1000 V nominal main bus as a conservative medium-voltage baseline (NASA NTRS, 20220017649).
So the correct way to use “12S–18S” in architecture discussions is:
Drone-typical systems: the band is operationally common and useful.
eVTOL-class systems: treat it as a reference point, not a ceiling. As you scale power, the architecture often has to move up in voltage.
The role of BMS telemetry in mission reliability and safety control
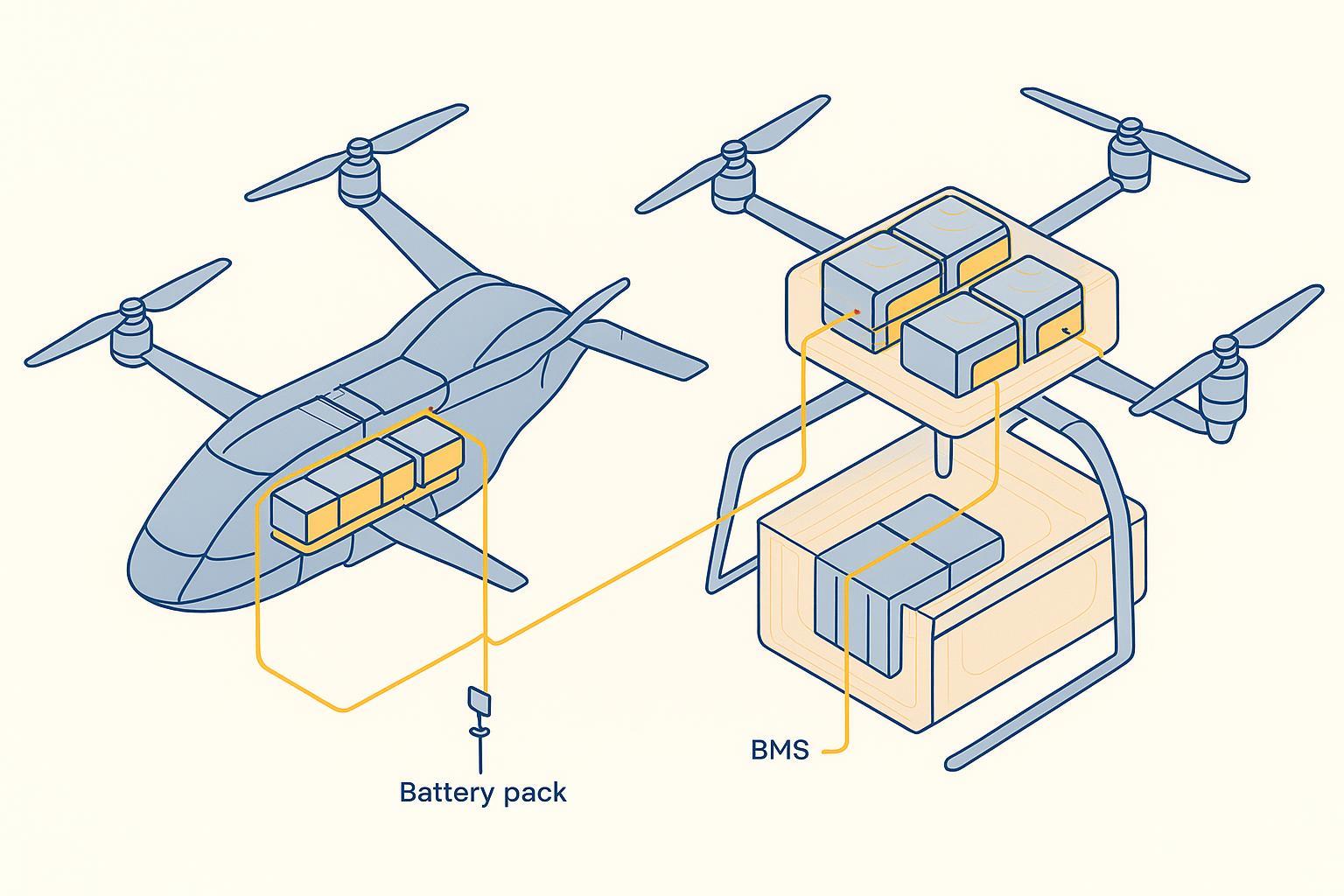
In low-altitude aviation, the BMS is not a battery accessory. It is a mission-control layer.
It translates electrochemistry into operational constraints:
current limits that preserve voltage stability
thermal limits that prevent runaway conditions
SOC/SOH estimation that operations can trust
event logs that support maintenance and safety cases
A battery system that cannot produce clean telemetry cannot produce a clean safety case.
If you want a battery-side view of why this matters even in industrial drone fleets, Herewin’s overview on the role of BMS in battery performance, safety, and lifespan is a solid baseline.
What next-generation drone and eVTOL batteries must solve
Higher energy density without sacrificing cycle stability
“Higher energy” is only useful if it survives the duty cycle.The real requirement is sustainable energy density:
stable impedance growth over mission-profile cycling
predictable performance across repeated burst events
no hidden thermal penalty that shifts into protection events
Faster charging without thermal degradation
Fast charge without thermal design is just accelerated aging.At the architecture level, fast turnaround implies:
cooling designed around charge as well as discharge
a BMS charge strategy aligned to duty cycle (SOC windows, temperature gating)
repeatable validation that fast-charge does not create an unacceptable degradation slope
Predictable performance across temperature extremes
Temperature is not only a range spec. It’s a variance spec.The requirement is predictable behavior at the edges:
no unexpected sag when cold
no runaway risk increase when hot
no sudden change in protection behavior because a sensor is not co-located with the hotspot
Fleet-level consistency as a system requirement
In aviation-adjacent operations, a “good pack” is not enough.You need narrow distribution:
cell quality distribution
assembly process repeatability
firmware behavior repeatability
qualification evidence that remains valid when the program scales
Why fleet operations redefine the battery problem
Single aircraft vs multi-aircraft energy logistics
A single aircraft can be managed like a project.
A fleet becomes logistics:
charging bays, thermal recovery, and swap inventory are capacity constraints
SOC accuracy becomes a scheduling input
maintenance and inspection become throughput problems
At scale, energy becomes an operations function.
Swap strategy and downtime economics in real operations
Swap versus fast charge is not a preference question. It’s a system decision.
The hidden costs typically live in:
thermal recovery time
connector wear and inspection
pack traceability and lifecycle tracking
variance between packs that forces conservative dispatch rules
Why battery variance becomes a scaling bottleneck
Variance is how engineering becomes operations pain.Two packs with the same nameplate spec can behave differently under burst load and temperature.
That difference forces operators to:
add margin
reduce payload
shorten routes
or accept unpredictable abort risk
None of those scale.
The emerging direction: energy systems + autonomy integration
The big shift isn’t that AI “adds a lot of watts.” The shift is that autonomy raises the bar for energy system observability—what the aircraft can know (and trust) about energy state in real time.
Why autonomy changes the energy problem
Autonomy can increase load (compute and sensing), but propulsion still dominates the power budget.
What changes more dramatically is the control requirement: the aircraft needs more reliable, higher-frequency energy-state signals to make safe decisions under uncertainty (wind, payload variation, temperature, degradation).
Battery + AI + flight control convergence in modern platforms
The direction is clear: flight control needs better energy-state awareness.
Architecture trends include:
tighter integration between BMS and flight controller
fault-aware power limits that map to controllability
energy-aware path planning that respects thermal recovery and reserve policy
Real-time telemetry as operational infrastructure
For fleets, telemetry is infrastructure:
SOC/SOH confidence that holds across packs
thermal gradients and hotspots (not just “max temp”)
fault codes that map cleanly to maintenance actions
traceability for what changed (cells, process, firmware)
Toward predictive energy management in aviation fleets
Predictive energy management isn’t a software layer you bolt on later. It only works when the underlying data stays stable as the hardware ages.
Autonomy’s real demand on batteries is trustable energy-state awareness—because that’s what turns telemetry into dispatch reliability.
What this means for OEMs, integrators, and fleet operators
Why procurement decisions are shifting upstream
Procurement is moving upstream because the battery is no longer a part you can “source later.”
It’s a piece of the vehicle architecture that defines:
voltage level
thermal management approach
redundancy model
certification evidence plan
maintenance and data strategy
Battery specification as part of system architecture design
A useful battery spec is not a list of marketing numbers.
It’s an architecture definition:
mission profile envelope (peak segments + frequency)
allowable sag and recovery behavior
thermal limits expressed as gradients and durations, not just a single max temperature
telemetry contract (what signals, at what frequency, with what accuracy)
qualification evidence package (what tests, what artifacts, what traceability)
If you’re building heavy-lift drone platforms today, a good starting point is to align supplier discussions around architecture outcomes instead of component specs.
Validation before deployment as a reliability gate
For aviation-adjacent systems, “validation” is not a single test.
It’s a chain:
mission-profile cycling
abuse and containment behavior
vibration and environmental exposure
data traceability and change control
If you reference standards in this context, be precise about what you mean.
For example, the FAA’s overview of lithium battery systems for aerospace applications discusses aviation battery qualification context, and RTCA documents such as DO-160 are commonly referenced for airborne equipment environmental test methods. Naming them is not the same as claiming compliance.
Energy reliability defines the next phase of low-altitude aviation
The next competitive advantage isn’t a single demo metric. It’s predictability—how consistently a battery system delivers power, manages heat, and ages under the exact mission profile you intend to fly. In practice, you’re designing for the same three outcomes every operator cares about: predictable peak power under vertical segments, predictable thermal behavior across sorties, and a predictable degradation slope over time.
Airframes will continue to improve, but many programs stall on repeatability. The teams that win will treat energy as architecture and infrastructure, not a part they can “spec later.”
If you want one quick test for whether a program is ready to scale, ask this: can the energy system produce predictable behavior and a complete evidence package across the fleet? If you’d like a second set of eyes, you can share your mission profile and turnaround target and request Herewin consultation on a battery architecture requirements checklist for internal reviews and supplier RFQs.
Method note: This article synthesizes publicly available analyses (e.g., ORNL, NASA, FAA/RTCA context) with battery-system engineering principles to highlight architecture-level constraints (energy window, thermal behavior, voltage stability, and telemetry). It is not a flight-safety certification guide and does not claim compliance for any specific platform; use it as a starting point for internal design reviews, validation planning, and supplier discussions.