











High-rise firefighting is an unusually punishing mission profile for small unmanned aerial systems. It’s not just “a drone with a thermal camera.” It’s a platform that has to hold position in turbulent air, collect usable data through smoke and heat distortion, and do it on a clock.
In that environment, the battery stops being a consumable component and starts behaving like part of the response infrastructure. The difference is subtle but operationally decisive: you can have “good specs” and still lose mission continuity.
A useful framing for high-rise firefighting drone operations is to treat the energy system as the continuity layer: when it becomes non-deterministic, the airframe and sensors inherit that instability.
Battery Reliability for Firefighting Drones Starts With the High-Rise Duty Cycle
In high-rise firefighting UAV operations, battery reliability is defined less by peak specs and more by whether power delivery stays predictable throughout hover-heavy, turbulence-correcting flights.
Urban high-rise scenes compress space, time, and safety margins. A flight that looks fine in a test field can become unstable or unpredictable when the aircraft is forced into narrow corridors, steep vertical profiles, and sustained hover.
Complex urban environments create unstable flight conditions
High-rise operations typically combine multiple destabilizers at the same time:
Wind turbulence between buildings: building wakes, downdrafts, and shear can force continuous control corrections.
Smoke interference and heat distortion: reduced visibility and thermal shimmer can degrade both human piloting and sensor interpretation.
Limited maneuvering space: fewer “escape paths” means less tolerance for power variability.
Urban emergency-response research also emphasizes that the built environment changes planning and control constraints compared with open terrain, including obstacle density and navigation complexity in city canyons (see the ISPRS Archives paper on urban emergency response UAV path planning (2025)).
Why traditional UAV performance metrics are no longer enough
Two procurement-friendly metrics are commonly over-weighted because they’re easy to compare:
Flight time
Payload capacity
They matter, but they’re incomplete.
Flight time measured in benign conditions doesn’t guarantee the aircraft will maintain stable power output when it’s forced into sustained hover, repeated accelerations, or high-wind correction.
Payload capacity doesn’t describe operational stability: a platform can lift a payload and still be mission-fragile if voltage drop, thermal derating, or protective cutoffs appear mid-sortie.
Mission Continuity Metrics for Emergency UAVs: A Shift in Success
For emergency-response drones, “mission success” is best measured as continuity: stable flight and usable data end-to-end, without battery-driven interruptions that break the decision cycle.
Fireground UAV missions often come down to one question: Did we get the data or action outcome in time to matter?
Why emergency UAV missions prioritize continuity over peak performance
In high-rise firefighting, peak performance is rarely the binding constraint. Reliability is.
That reliability shows up as two battery behaviors that don’t make headlines—but keep missions on track:
Stable power output under sustained load (not only during brief bursts)
Predictable discharge behavior during hover missions (voltage under load behaves consistently sortie to sortie)
When those conditions hold, the flight controller behaves more deterministically. When they don’t, the aircraft can bounce between “fine” and “failsafe,” which is hard to plan around.
What mission failure actually means in firefighting operations
In firefighting UAV deployments, “battery failure” is often a continuity break, not a dramatic pack event.
A mission can still fail operationally even if the battery never vents, swells, or visibly overheats—because any battery-driven interruption can break the response loop.
In practice, failure often looks like one of these outcomes:
Interrupted reconnaissance (no continuous thermal/visual feed)
Delayed response cycles (extra swaps, longer cool-down, unplanned landings)
Loss of real-time situational awareness (command decisions revert to partial information)
From an incident-command perspective, that’s not a spec problem. It’s a continuity problem.
In emergency UAV programs, the most expensive failure mode is often not hardware replacement—it’s the loss of a decision window.
UAV Thermal Management Under Sustained Load: The Thermal Stress Constraint
In high-rise firefighting drone deployments, thermal management is a reliability constraint: as the pack heats up under sustained discharge, voltage stability and protection thresholds can start to dictate whether the aircraft can stay in the air.
In other words, thermal stress is a recurring operating condition—not an exception—and it defines what “safe, repeatable flight” really means.
Why high-temperature environments increase system instability
There are two heat sources that can co-occur:
External heat from fire zones: higher ambient temperature and radiant heat near hot spots.
Internal heat accumulation under continuous discharge: heat generated inside the pack and its interconnects during sustained current draw.
Electrically, internal heating is tightly coupled to resistance and current. Under high current draw, small resistance increases can produce much more heat (I²R losses).
Operationally, that often shows up as faster temperature rise, earlier derating, or protection-triggered interruptions.
This is where the terminology matters: the risk isn’t only “shorter flight time.” It’s exposure to drone battery voltage sag internal resistance effects under the real duty cycle.
Thermal management literature for UAV and eVTOL packs typically frames an “optimal operating window” and then evaluates how passive/active/hybrid management strategies keep the pack inside it (see NeoGraf’s overview of battery thermal management in UAV/eVTOL applications (2025)).
Why thermal stability defines operational safety boundaries
Thermal stability is a boundary condition for two reasons:
Reduced battery reliability under stress: usable energy and voltage stability can degrade as the pack heats under load.
Limited safe operating envelope in emergency scenarios: emergency missions tend to stack stressors (heat + hover + payload + turbulence), leaving less margin for variability.
For command staff and procurement teams, the actionable takeaway is not “avoid heat”—that’s not always possible. It’s “define the envelope, validate it, and build SOPs that keep sorties inside it.”
Why Battery Systems Are Becoming Mission-Critical Infrastructure
If drones are being adopted as first-arrival sensors and situational awareness tools, the supporting energy system inherits the same expectation: it has to work the same way, every time, under stress.
From component thinking to system infrastructure thinking
Infrastructure thinking changes the questions.
Instead of asking:
“What’s the maximum flight time?”
You ask:
“What’s the probability the system completes the mission profile repeatedly without protective cutoffs?”
“What logs prove this under an auditable test method?”
Public safety programs live and die by repeatability. That’s why readiness beats a one-off best-case flight.
What defines a mission-critical UAV power system
A mission-critical UAV power system is less about headline specs and more about behavior under constraints:
Predictable energy delivery: discharge curve stability under the real duty cycle (hover-heavy, high-current corrections).
Consistent performance under repeated missions: minimal drift between sorties as temperature and state-of-charge change.
Controlled failure behavior under stress: clear, testable protections and telemetry rather than silent degradation.
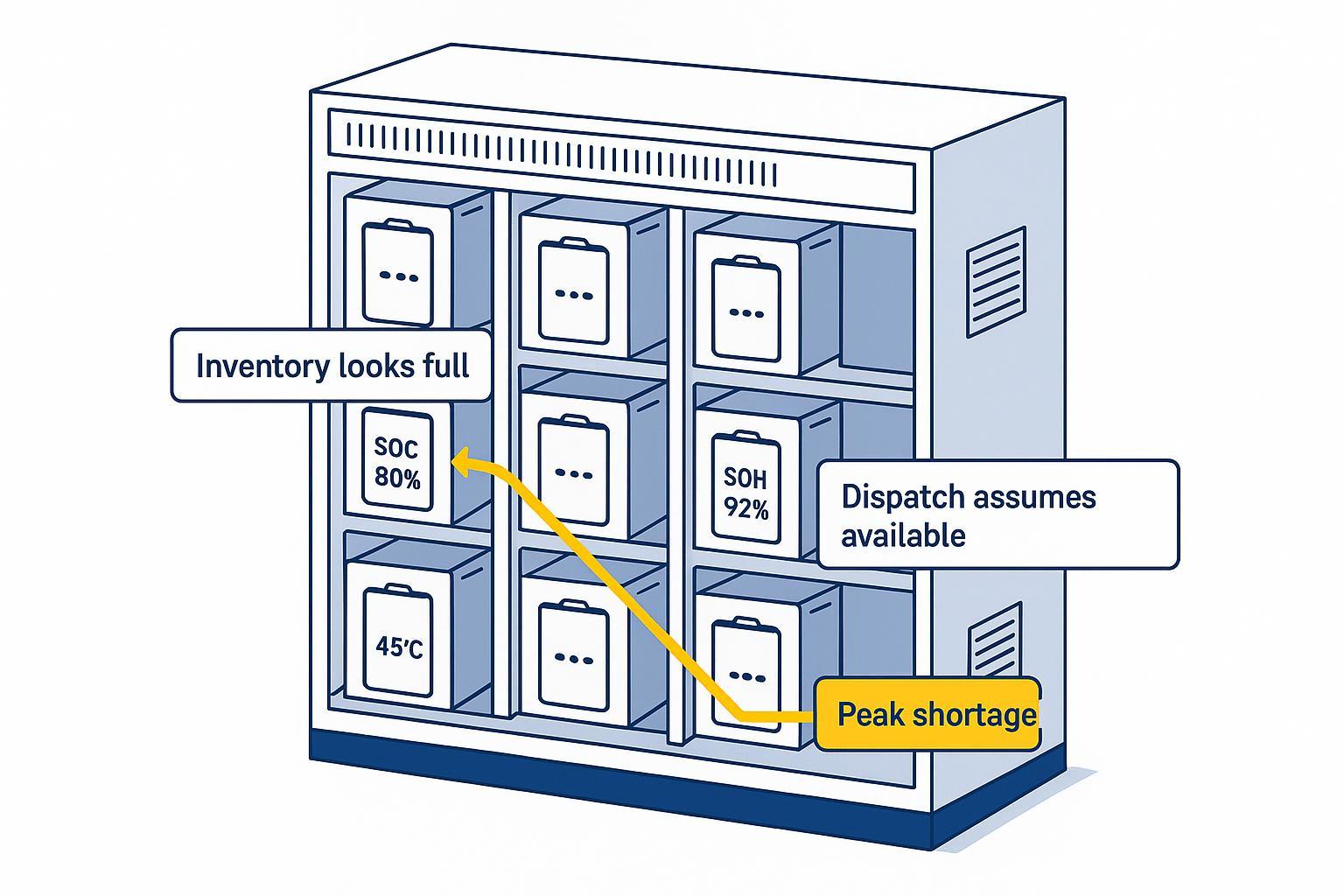
A practical way to make this auditable is to treat batteries like monitored subsystems, not opaque consumables.
What to monitor | Why it matters in high-rise ops | What it can indicate |
|---|---|---|
Voltage under load (not just % SOC) | Hover stability depends on it | Voltage sag exposure, rising internal resistance |
Temperature rise rate during sustained hover | Heat is cumulative in multi-sortie operations | Thermal bottlenecks, insufficient dissipation |
BMS events (warnings, derating, cutoffs) | Mission interruption is the core risk | Protective thresholds being hit in normal ops |
Connector and harness condition | High current makes small resistances expensive | Contact resistance heating, intermittent drops |
For internal governance, those logs can become part of procurement acceptance criteria and post-incident traceability.
The Future of Urban Emergency Drone Systems: Reliability Over Performance
The industry shift is not “longer flight time at all costs.” It’s a redefinition of what performance means when the mission is safety-critical.
Why the industry is shifting from performance to reliability
In emergency deployments:
It’s not longer flight time, but guaranteed mission completion under the real duty cycle.
It’s not peak output, but operational consistency.
Broad disaster-response coverage often frames UAV value as faster assessment and reduced responder exposure; the same logic implies continuity is essential because the UAV’s output is only valuable if it arrives in time to support decisions (ePropelled’s overview of UAVs in disaster response (2025)).
What next-generation firefighting UAV systems must deliver
Reliability-first systems typically emphasize:
Stable energy systems in extreme environments (heat, turbulence, smoke-adjacent duty cycles)
High predictability in emergency deployments (repeat sorties, standardized swap/charge/inspection)
Telemetry and documentation that stand up to audit (what happened, when, under what conditions)
That’s not just a battery design problem. It’s a system-integration problem: pack + BMS + connectors + thermal path + charging + SOP.
Urban Emergency UAV Systems Are Entering a Reliability-First Era
Battery reliability is becoming a defining factor in mission success because it governs whether the UAV can deliver stable, continuous capability under stacked stressors.
At the same time, emergency UAV programs are evolving into infrastructure-level systems: they’re expected to be repeatable, testable, and defensible in procurement and post-incident review.
If you’re building or buying firefighting UAV capability, the reliability-first move is simple: define the mission duty cycle, measure the right signals, and treat power behavior as a continuity KPI—not a spec-sheet line item.
Next step (for procurement and program leads): If you need an audit-friendly battery reliability evaluation checklist (what logs to request, what test profiles to run, and what acceptance criteria to document), talk with the Herewin team about your firefighting duty cycle and compliance requirements via our Contact page.