











A small drone program can treat batteries like “gear.” You buy extra packs, charge them at base, and keep flying.
But with 30–100+ aircraft across multiple sites, energy stops being “equipment” and starts behaving like infrastructure.
The limiting factor isn’t the airframe spec sheet. It’s whether you have a deployable drone battery charging system—a mobile drone charging station setup that supports battery logistics across multi-site UAV operations.
The buying question is no longer only Which drone do we buy? It becomes How do we power this fleet in the field—safely, repeatably, and at the required tempo?
In other words: mobile drone charging is now part of drone procurement RFP requirements.
This is why demand is rising for mobile drone charging systems and scalable UAV fleet energy infrastructure: field uptime now depends on battery logistics as much as aircraft performance.
Why Spare Drone Batteries Fail at Scale in Multi-Site Operations
The “Accessory Model” of Early Drone Operations
In the early stage, energy behaves like a consumable:
Batteries are treated like spare parts, not infrastructure.
Charging happens at base, in a vehicle, or wherever there’s an outlet.
Downtime is annoying, but not a program-level constraint.
The implicit belief is simple: Energy is an accessory, not infrastructure.
Why Spare Packs Worked in Small Fleets
Spare packs do “work” when the operating model stays simple:
Low mission frequency (battery cycles don’t overlap aggressively).
Single-site operations (charging is centralized by default).
Predictable turnaround (field conditions don’t swing the plan).
In that environment, adding battery inventory often increases mission readiness.
Drone Battery Rotation vs Spare Pack Inventory: What Actually Scales
Scaling Beyond 30–100 Aircraft
At scale, three pressures stack up:
Missions increase faster than charging capacity. Scheduling compresses, and battery cooldown/charge windows collide.
Deployments become multi-site. Your “charging room” is no longer a room—it’s wherever the fleet is.
Downtime becomes an operational constraint. A delayed charge cycle becomes a delayed work order, a missed SLA window, or a rescheduled crew.
This is where the old mental model breaks.
The Hidden Limitation: Energy Is No Longer Local
Centralized charging assumes energy logistics are stable:
Packs return to base on time.
Site power is available.
The next mission starts where charging capacity exists.
Scaled operations violate those assumptions. Logistics starts to dominate outcomes.
The result is uncomfortable but common: you have enough aircraft, enough packs—yet field readiness becomes inconsistent.
Why Mobile Drone Charging Stations Are Becoming Essential for UAV Fleets
This is the core transition: the bottleneck moves from “having energy” to “accessing energy where the work is.”
From Charging Stations to Field Energy Systems
Static charging is designed for a single place and a stable schedule.
Fleet scaling creates the opposite:
dynamic mission patterns
shifting sites
variable power quality
shared charging lanes across aircraft types
So the solution category shifts as well. What you actually need is a field energy system—a deployable combination of:
charging power (kW)
stored energy (kWh)
rotation workflow via an SOP (standard operating procedure)
safety controls
telemetry / visibility
If you already think in “systems,” it’s the same logic behind a mobile BESS architecture (battery, PCS, EMS) and sizing logic: components matter, but integration, protection hierarchy, and acceptance testing determine whether it’s deployable.
Energy Mobility Defines Mission Continuity
Once operations become multi-site, “charging speed” is no longer a spec. It becomes a logistics variable.
Downtime shifts:
from aircraft performance
to battery rotation speed + field charging availability + energy logistics reliability
Put simply: drone fleet battery rotation is directly tied to fleet uptime and mission throughput. At scale, energy becomes a deployment constraint.
Why Spare Packs Stop Increasing Productivity
At scale, spare inventory grows… but sortie rate stalls.
The bottleneck isn’t inventory count. It’s flow:
Can depleted packs move back into “mission-ready” status fast enough?
Can you charge at the edge without introducing safety risk or asset-life penalties?
Can you maintain the same rotation discipline at every site?
A larger pile of batteries doesn’t automatically create a faster rotation system.
Mobile Drone Charging in Procurement and RFP Decisions
Drone Procurement No Longer Happens in Isolation
Scaled fleets don’t buy “a drone.” They buy a capability.
So procurement teams start evaluating:
system readiness (not just aircraft performance)
integration risk (chargers, connectors, telemetry)
deliverability (deployment workflow + documentation)
safety/compliance defensibility
In practical terms: if a vendor can’t explain field charging architecture, they haven’t explained fleet capability.
What Fleet Managers Now Ask During Procurement
Questions that show up in real RFP reviews look like this:
How is field charging for drone fleets handled across multiple sites?
What is the expected battery rotation model (swap lanes, cooldown windows, charge lanes)?
Can the energy setup run on generator / vehicle / weak-grid inputs without unstable behavior?
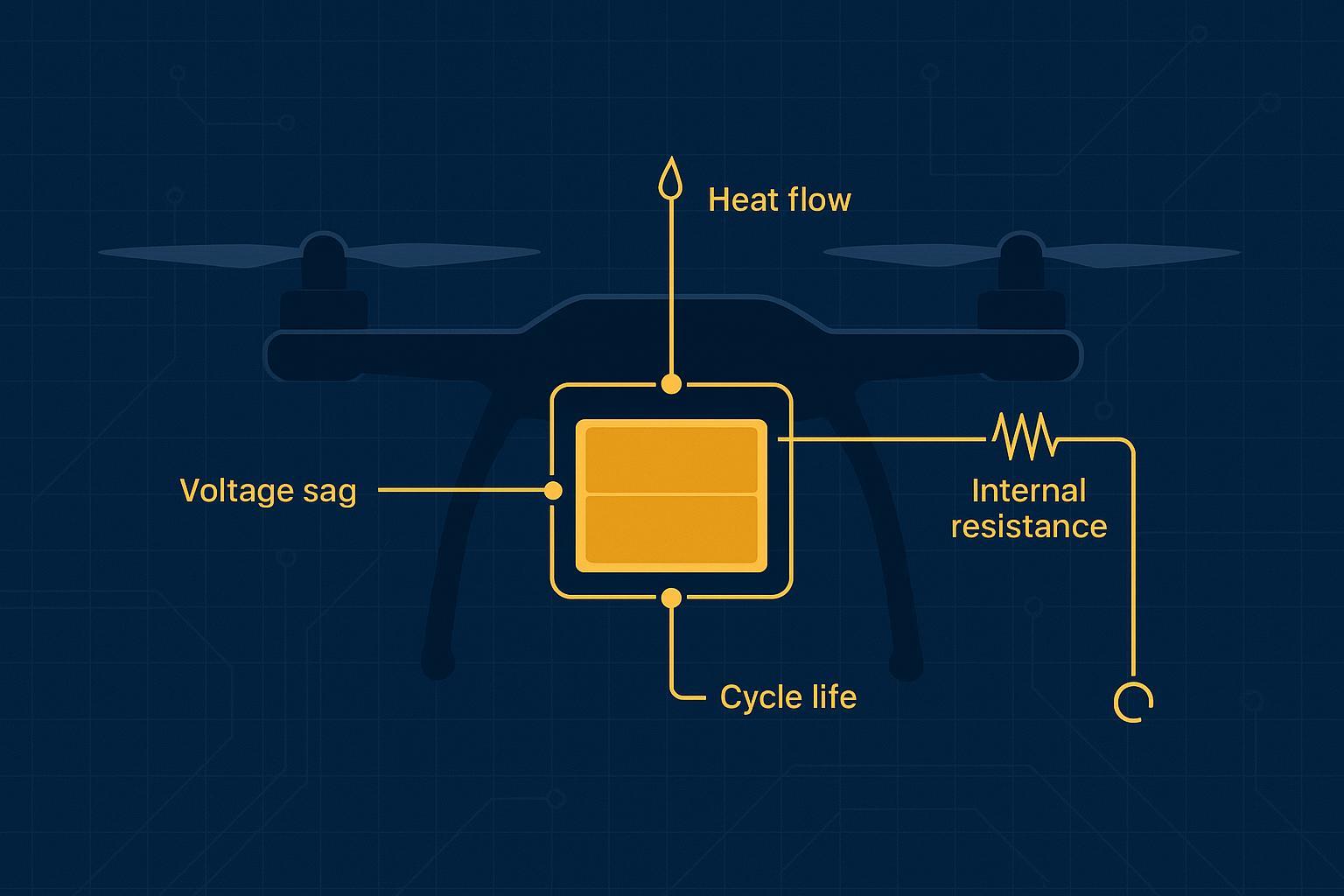
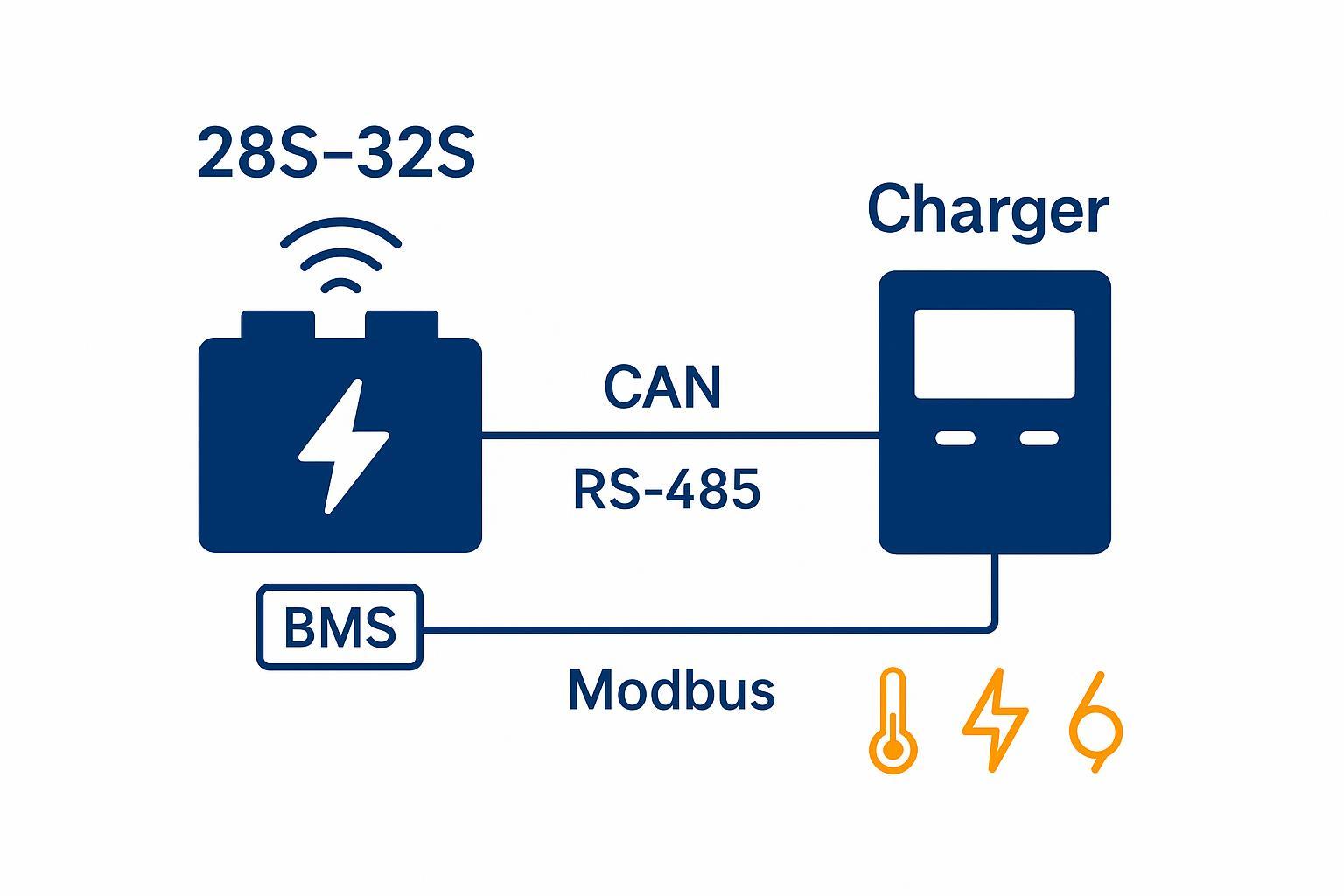
What telemetry is available for cycle count, temperature history, and state-of-health (often reported via BMS, the battery management system)?
What are the safety controls for charging discipline and damaged-pack handling?
If you want a tactical starting point, treat charging as an uptime lever and define two lanes—maintenance vs surge—based on your mission tempo. That’s the engineering intent behind an industrial drone charger selection guide on charging strategy and uptime.
From Product Specs to Operational Architecture
Aircraft specs still matter. But they’re not sufficient.
Procurement has to validate the operational architecture:
Potência: kW available to charge the required number of packs per hour
Energy: kWh available between resupply/refuel events
Process: standardized SOP that can be audited and taught
Visibility: fleet-wide battery asset tracking
This is why the procurement question changes from:
Which drone do we buy?
to:
How do we power this fleet in the field?
How Drone Fleet Operators Deploy Field Charging Infrastructure
From Spare Parts Thinking to System Thinking
In scaled fleets, batteries are no longer “spares.” They’re mobile infrastructure.
That shift changes how you write requirements:
from “battery quantity”
to “rotation throughput and safety controls”
A simple (transparent) way to force clarity is to model throughput.
Example assumptions (replace with your own numbers):
Fleet size: 60 aircraft
Average energy per sortie: 1 pack
Average sorties per aircraft per day: 4
Packs per aircraft in circulation: 4
Charge from depleted to mission-ready: 45 minutes (including handling/cooldown)
Then the operations question becomes:
How many charging bays (and how much kW) do we need per site to avoid backlog?
A procurement-friendly throughput and TCO model
Use this table as a requirements worksheet. Every value should be explicit in an RFP—especially what counts as “mission-ready.”
Variable | What it means | Example assumption | Why procurement cares |
|---|---|---|---|
Fleet size (aircraft) | Total aircraft supported | 60 | Defines peak demand |
Sites active per day | Concurrent deployment sites | 3 | Drives replication cost |
Packs per sortie | Packs consumed per mission | 1 | Converts missions to energy flow |
Avg sorties/day/aircraft | Mission tempo | 4 | Sets throughput target |
Packs in circulation/aircraft | Buffer inventory | 4 | Inventory cost vs uptime |
Mission-ready definition | Voltage/SOC/temp criteria | Defined by SOP | Prevents “charged-but-unsafe” |
Usable charge window | SOC range used in ops | Defined by policy | Impacts cycle life |
Charge lane policy | maintenance vs surge | Two-lane | Controls degradation risk |
Charging bays per site | Parallel charge capacity | calculated | Gate for sortie rate |
Power per bay (kW) | Charger power delivered | defined | Infrastructure sizing |
Telemetry requirements | SOH/cycle/temp logs | required | Audit + predictive maintenance |
Acceptance artifacts | FAT/SAT logs & thresholds | required | De-risks deployment |
If your organization needs storage and power conditioning at the edge, don’t just specify “portable battery.” Specify architecture and acceptance criteria—exactly the disciplines used in field power systems.
For battery care policies, keep the basics defensible and consistent with recognized guidance: sources like Justrite’s workplace guidance on storing lithium-ion batteries (2024) recommend partial SOC for storage, and Battery University’s BU-808 on prolonging lithium-based batteries explains why high SOC combined with heat accelerates aging.
What Leading Operators Are Standardizing
Scaled operators converge on the same building blocks:
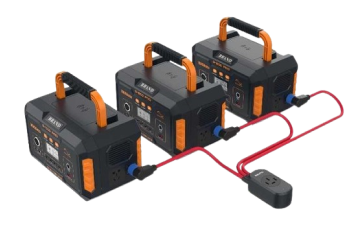
Mobile charging units sized for throughput, not convenience
Portable energy storage where grid power is weak or absent
Standardized charging and rotation SOP (including damaged-pack handling)
Fleet-wide BMS visibility (cycle count, thermal history, anomaly flags)
For field deployments, selection criteria need to be explicit about portability, safety systems, and compatibility—see fast-charging batteries for field use: portability, safety, compatibility as a starting checklist.
Procurement language matters, but it should come after you’ve defined the operational problem. Use the checklist below as a way to translate field constraints—battery logistics, throughput, and safety controls—into requirements your team can evaluate consistently.
RFP requirements checklist for fleet energy architecture
Below is procurement language you can lift directly into an RFP (edit to match your fleet).
A. Throughput and scalability
Define packs/hour per site at peak tempo
Define minimum charging bays per site and replication plan
Define behavior under surge demand (priority rules)
B. Power input resilience
Wide input tolerance (generator/vehicle/weak grid)
Documented derating behavior under poor power quality
C. Safety and operational controls
Temperature-aware charging and fault isolation
Documented SOP for inspection, quarantine, and damaged-pack handling
Storage policy (SOC window + temperature limits) aligned to recognized guidance
D. Interfaces and compatibility
Connector standards, strain relief, and field serviceability
Clear compatibility matrix across aircraft types and pack variants
E. Telemetry and auditability
Pack-level logs: cycle count, thermal events, alarms, SOH (state of health) estimates
Exportable data and event timestamps for investigations
F. Acceptance tests and deliverables
Factory acceptance test (FAT) procedure + logs
Site acceptance test (SAT) procedure + logs
Pass/fail thresholds and the exact evidence format delivered
FAT/SAT are the documented test steps and evidence used to confirm the system meets pass/fail thresholds before and after deployment.
Fleet scalability is an energy deployment problem
A scaled drone fleet is not constrained by how many aircraft you can purchase.
It’s constrained by whether energy can be deployed as infrastructure—with the throughput, safety controls, and visibility required to run multi-site operations without improvisation.
That’s why mobile charging and field energy systems are no longer “nice to have.” They’re entering procurement because they define whether the fleet can scale.
Next steps
If you’re writing an RFP or expanding from a small program into a multi-site fleet, a practical starting point is a one-page Fleet Energy Architecture requirement sheet: throughput targets, site count, input power assumptions, telemetry requirements, and acceptance artifacts.
Herewin supports OEM/ODM battery and charging-system design for industrial deployments—if you want a technical review of your draft requirements, start with the Herewin engineering team.