











Heavy-lift UAV programs tend to encounter two technical bottlenecks in succession: first, whether the airframe can carry the payload; and second, whether the mission can tolerate a single point of power failure.
In the 100–200kg heavy-lift class, redundancy is far from just “adding another pack”—it is a complex system engineering challenge. It demands millisecond-level load sharing, backfeed prevention, and fault isolation under extreme operating conditions, including vibration, temperature gradients, and high transient currents.
Building on our previous analysis of MTOW Selection Benchmarks for 10–200kg UAVs, this guide provides a deep evaluation framework for the consideration stage. From predicting failure modes to defining the reliability boundaries of the control layer (BMS + switching hardware), we aim to help engineering teams transform a “power system” into an auditable, diagnosable “mission asset.”
Why Heavy-Lift UAVs Require Redundancy System Design
The Risk of Single Battery Failure in 100kg+ UAV Missions
A single battery is a single failure domain. For heavy-lift platforms, that domain is tightly coupled to stability margins because thrust reserve is often budgeted for payload and wind, not for degraded electrical performance.
When the power source is a single pack, a small set of events can collapse mission continuity into “immediate constraint management”: sudden voltage sag under step load, an internal short, a contact resistance spike, a connector event, or a protection trip.
Redundancy design shifts the question from “will a pack fail?” to “what does the system do when a pack exhibits abnormal behavior?” That is a control and isolation question, not just an energy-density question.
To make the rest of this guide actionable, define the evaluation requirements first—then map them to a physical topology.
Operational and Qualification Requirements for Industrial UAV Power
Industrial UAV operations increasingly require:
Predictable return-to-home energy accounting (not just nominal capacity)
Diagnosable faults (so a fleet team can find root causes instead of swapping packs blindly)
Qualification evidence (test reports, transport documentation, traceability)
These expectations are aligned with the way other mission-critical power systems are evaluated: the architecture must maintain service under an input fault and must provide an evidence trail that explains what happened.
Physical Topologies for Redundant Power
Before you compare packs, define the physical topology you’re actually buying into. In the 100–200kg class, two patterns show up most often:
Ideal-diode (ORing) isolated parallel: packs share a common DC bus through ideal-diode / ORing elements so they can load-share while blocking reverse current. This topology can be efficient, but it demands tight control of current sharing, fault isolation timing, and thermal management at the power-path hardware.
Independent power-path management (dual PMU / path-controlled): each pack feeds the propulsion power domain through its own managed path (contactors + precharge + switching control), and the system decides when to run shared, when to run single, and when to isolate. This can reduce uncontrolled circulating currents, but it raises requirements on control logic, sensing, and transition stability.
A practical decision lens is: do you need continuous load sharing, or do you need predictable isolation and handover under burst loads? The answer should be driven by measured transient currents, wiring/connector impedance, and the fault evidence you can log during flight.
Redundancy Decisions as a Heavy-Lift UAV TCO Problem
Redundancy adds mass, volume, and integration complexity. The right question in the 100–200kg class isn’t “how redundant can we make it?”, but what is the minimum architecture that removes the highest-consequence single points of failure at acceptable total cost of ownership (TCO).
A simple TCO lens for heavy-lift UAV programs compares redundancy weight and hardware cost against:
Probability-weighted loss: airframe + payload + third-party liability
Downtime economics: lost missions, recovery logistics, and revalidation time after an electrical incident
Fleet maintenance cost: how quickly the team can isolate root causes instead of swapping packs blindly
This framing keeps the discussion grounded: the architecture is justified by measured system behavior under fault and clear evidence trails, not by marketing-level safety claims.
Thermal & Electrical Stress Under High-C Discharge
In 100–200kg platforms, redundancy design becomes most visible during burst discharge events. If your mission profile includes aggressive step loads, the battery system must tolerate 50C–80C instantaneous discharge without turning small mismatches into runaway heat.
That’s why it’s helpful to treat this section as a coupled problem: electrical stress (current sharing + reverse current + impedance mismatch) and thermal stress (localized heating + propagation risk) are inseparable at high C-rate.
If you’re doing a design review, evaluate the whole stack—pack impedance, power-path hardware, wiring/connector resistance, sensing placement, and isolation policy—because small mismatch terms can dominate both heat and aging outcomes.
DCIR Mismatch and Circulating Current in Parallel Packs
Parallel-connected cells or packs share a bus voltage, but they do not automatically share current equally.
It also matters which resistance metric you’re comparing:
ACIR is commonly used for production screening and cell matching.
DCIR is more directly relevant for system load evaluation (voltage sag, heat under real discharge, and current sharing behavior).
For redundancy, DCIR drift over temperature and aging is often what turns “matched on day one” into “imbalanced in the field.”
A key mechanism is parameter mismatch—especially ohmic internal resistance differences. A peer-reviewed analysis of parallel-connected cells notes that differences in ohmic internal resistance cause branch current imbalance; the cell with lower resistance can initially carry higher current, and the imbalance can expand sharply near end-of-discharge as resistances change with SOC and polarization effects (PubMed Central paper on cell-parameter differences in parallel packs).
In pack-level implementations, “circulating current” is often used as shorthand for unintended current flow between packs driven by small voltage differences (open-circuit voltage, contact resistance, wiring impedance). The risk is not only efficiency loss; it’s localized heating and unpredictable stress distribution.
Why Small Electrical Differences Lead to Thermal Imbalance
Once branch current diverges, thermal divergence tends to co-occur. Joule heating scales with current and resistance, and the hottest location is not necessarily the average of the pack.
Two patterns show up repeatedly in high-power systems:
Localized overload at a connector, busbar, or cell group with higher resistance.
Thermal-gradient feedback where temperature-dependent resistance shifts current distribution over time.
In multi-pack systems, “average pack temperature” can look benign while one local interface is operating near a limit. Instrumentation placement is a reliability choice.
Thermal imbalance also complicates diagnostics: what looks like random drift can be a stable pattern tied to mechanical interfaces (vibration, torque relaxation, contamination) rather than electrochemistry.
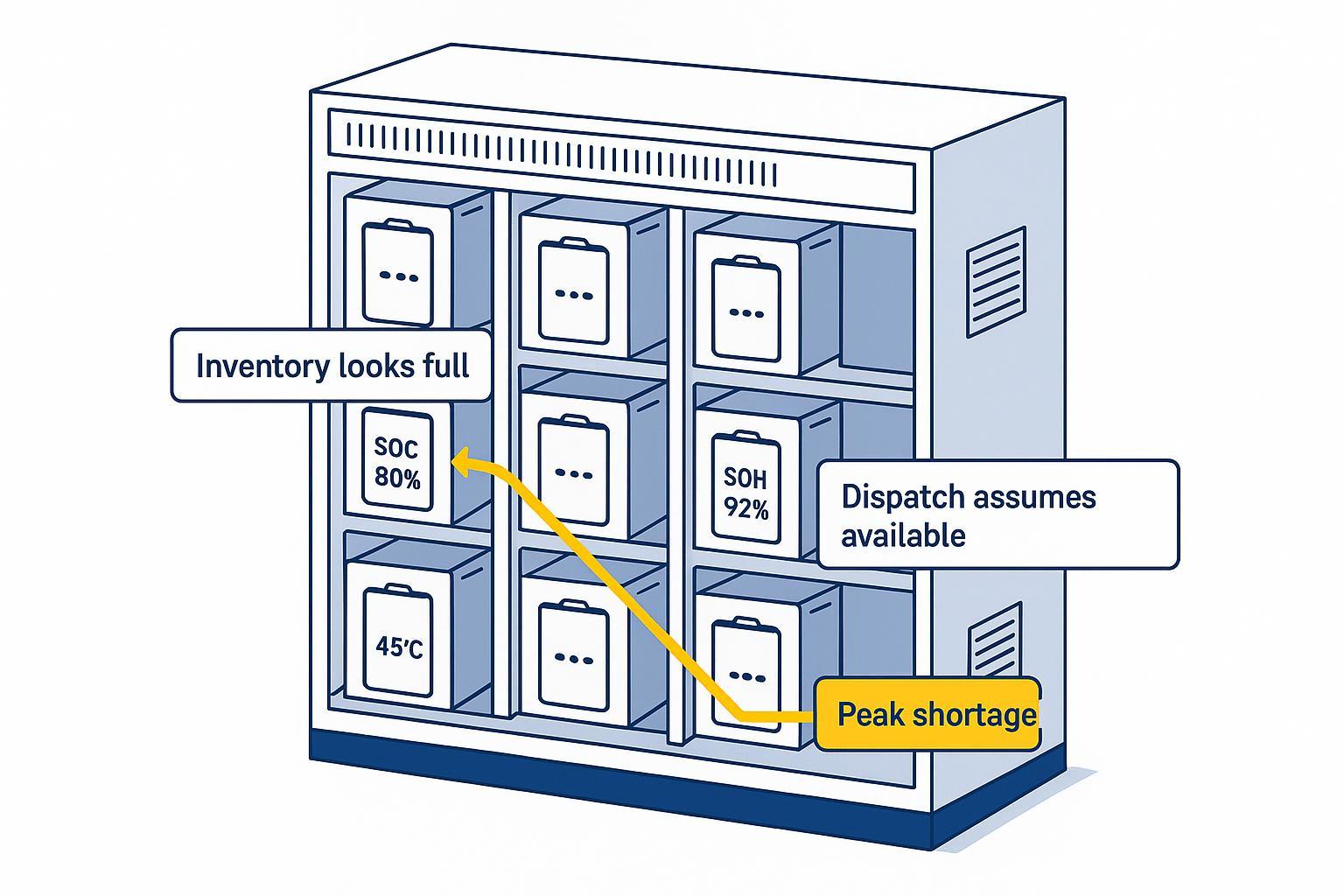
SOC Imbalance and Unstable Battery Switching Behavior
Even when packs start matched, SOC estimation and drift become control problems over a fleet lifecycle.
If one pack’s SOC estimator is biased, control logic that relies on SOC thresholds can cause unstable transitions—packs repeatedly entering/exiting a sharing window, or a “handover” event occurring at a moment of high load transient.
This is also where SOC imbalance in parallel packs becomes an operational risk: a system can look redundant in schematic form but behave noisily once estimators drift under temperature and aging.
BMS as the Core of UAV Redundancy System Design
The BMS is no longer just a protection layer. In redundant architectures, it becomes a system controller: it decides which pack is allowed to source current, when to isolate, and what to log for post-flight analysis.
From Battery Protection to System-Level Control Logic
At minimum, the control layer must support:
Fault classification (what event occurred, how confident the detection is)
Isolation decisions (open a contactor, disable a path, inhibit reclose)
Load-sharing policy (static share, dynamic share, or hot-standby)
Evidence generation (CAN events, timestamps, sensor values)
This is where electrical architecture (ORing/ideal diode, contactors, precharge paths) and software policy meet.
Precision SOC as a Switching Stability Anchor
In redundant architectures, SOC accuracy isn’t just a fuel gauge—it’s a stability parameter for power-path handover.
If the system policy is “handover when Pack A reaches X%,” the quality of that “X%” determines whether transitions are smooth or whether the system starts hunting (rapid, unstable switching between packs). Leveraging combined coulomb counting + voltage compensation, industrial-grade systems—such as those implemented by Herewin—report SOC display errors within ±3% and support remaining-time estimation in flight (Herewin’s industrial drone BMS guide).
This level of precision matters because mission-critical Return-to-Home logic should be driven by remaining chemical energy, not transient voltage recovery after a burst load.
For architecture review, the key question is whether SOC remains stable across:
Temperature bands
High C-rate transients
Aging and resistance growth
If those conditions aren’t characterized, pack transitions become timing-dependent—and redundancy can behave unpredictably under stress.
CAN-Based Fault Detection and Rapid Isolation
CAN is often the practical backbone for fault reporting, event timing, and fleet diagnostics.
A useful evaluation approach is to request (or define internally) a fault dictionary and event log spec:
What fault codes exist (overcurrent, cell voltage spread, overtemperature, insulation, comms loss, voltage sense lead open, NTC sensor drift/out-of-range)
What minimum fields are logged (timestamp, pack ID, bus V/I, contactor state, temperature channel)
What the isolation policy is for each class (trip once, latch-open, allow reclose after cooldown)
This is where “redundant” becomes measurable: the claim is materially stronger when fault isolation is tied to an auditable event stream rather than a black-box protection trip.
In procurement language, this is often the difference between “a BMS exists” and a defined UAV BMS fault isolation capability.
Thermal Safety Challenges in Redundant UAV Power Systems
Redundancy increases component count (packs, switches, connectors). That increases monitoring needs and creates more places where abnormal heat can appear.
Redundancy is also moot if control electronics fail due to environmental exposure. For industrial deployments, it’s reasonable to require at least IP65 ingress protection for relevant control hardware and enclosures, and to validate operation across a -20°C to 60°C temperature band (or your site-specific extremes).
Circulating Current Heat and Localized Overload
Unintended inter-pack currents and unequal sharing can create heat that is invisible at the system level.
A practical guardrail is to ensure the architecture blocks reverse current and limits backfeeding paths. ORing architectures are widely used in redundant power systems specifically to prevent backfeeding and to isolate a faulty source; DigiKey’s overview describes how ORing/ideal-diode controller approaches use MOSFETs plus fast control to block reverse current while reducing the loss of diode-only solutions (DigiKey on ORing controllers for redundant power).
At heavy-lift power levels, this is also a hardware survivability problem: under 50C–80C burst discharge, even small connector or harness resistance can create hot spots that trigger protective trips or accelerate degradation. The evaluation focus should be where heat concentrates (connectors, busbars, switching MOSFETs/contactor terminals), not only average pack temperature.
For UAV battery redundancy, the specific implementation differs, but the failure being avoided is similar: one source should not be allowed to sink from the bus when it is abnormal.
In review meetings, it helps to label this explicitly as a UAV system architecture question: which elements enforce one-way energy flow, and which elements decide isolation timing.
Thermal Runaway Risk in Multi-Pack UAV Systems
Multi-pack systems introduce propagation questions:
Can a fault in one pack drive abnormal current in another?
Can thermal energy couple through mounting structures or enclosure walls?
Is isolation fast enough to prevent a second pack from feeding a failing one?
Battery safety references aimed at configuration basics also highlight that parallel faults can be severe: Battery University notes that an electrical short in a parallel cell is serious because the faulty cell can drain energy from other cells, creating a fire hazard; large packs often incorporate a fuse to disconnect a failing cell in such a scenario (Battery University BU‑302).
Even when your architecture is pack-level rather than cell-level, the principle generalizes: a redundant source becomes a hazard if it can feed into a fault domain you can’t isolate.
Why Material Stability Matters in High-Power UAV Batteries
Material stability is typically discussed at the chemistry level, but architecture decisions determine whether you operate the pack inside a stable envelope.
In heavy-lift duty cycles, the evaluation focus is often on:
Stability of voltage under pulse loads
Temperature rise distribution (not just peak)
How resistance growth changes current sharing over the service interval
A redundancy design that depends on perfect matching is fragile. A design that tolerates aging drift and still behaves predictably tends to be more robust.
The Future of Heavy-Lift Safety: Semi-Solid State Integration
As we look toward 2026-2027, the next boundary in power reliability is the transition to semi-solid state technology. By significantly reducing the liquid electrolyte fraction and utilizing specialized solid-state separators, these cells inherently suppress lithium dendrite growth and virtually eliminate the risk of thermal runaway propagation between redundant packs. For 100–200kg platforms, where energy density and safety are in constant tension, semi-solid architectures offer the most viable pathway to achieving a 350–400Wh/kg energy density without expanding the redundancy system’s physical footprint or compromising high-current stability.
System Efficiency and Lifecycle Optimization
Redundancy can be designed as “hot standby” (one pack active, one reserve) or as “load sharing” (both contribute). Each choice changes efficiency and stress distribution.
Load Sharing and Battery Stress Reduction
In principle, sharing current can reduce peak stress on any single pack, but only if the sharing is controlled and stable.
The engineering concern is that poor sharing can create the opposite outcome: one pack runs hotter and ages faster, widening mismatch and making sharing worse over time.
This is why the evaluation should include measured current distribution and thermal maps, not just wiring diagrams.
Why Redundancy Can Improve Battery Cycle Life
The mechanism is indirect:
Lower peak currents can reduce resistive heating and voltage sag events
Reduced time near extreme SOC windows can reduce stress
Better diagnostics can keep weak packs from being unknowingly overused
At the cell level, some heavy-load designs use nano-silicon carbon anode formulations to improve high-rate capability. In high-power industrial mission profiles, combined with smarter redundancy allocation, manufacturers commonly target cycle-life improvements from a typical ~300–500 cycles range toward ~500–800 cycles (the exact result depends on temperature, depth of discharge, and burst-load frequency).
The key caveat is that these benefits depend on instrumentation and control policies that prevent unstable switching and detect drift early.
The choice of power architecture should be driven by mission intensity. Within a comprehensive industrial ecosystem, one might deploy a high-efficiency architecture (10C–30C) for long-endurance surveying missions where cost-per-hour is the primary metric. However, for the 100kg+ heavy-lift class, the requirements shift toward a high-discharge redundancy architecture (50C–80C). This tiered approach ensures that each UAV platform operates within its optimal electrochemical envelope, maximizing fleet-wide TCO.
Operational Reliability in Continuous Industrial UAV Missions
For continuous operations, redundancy also becomes an operations feature:
Predictable pack retirement rules (based on logged events and impedance growth)
Swap policies informed by actual duty cycle, not calendar time
Reduced “mystery faults” because events are traceable
For supplier capability baselining, Herewin’s drone battery solution overview emphasizes real-time BMS monitoring and multi-layer safety protection, and it presents multi-pack configurations across drone categories (Herewin drone battery solutions).
Why Redundancy Is Becoming Industry Standard in 100kg+ UAVs
Redundancy adoption isn’t driven by abstract safety arguments alone; it’s being pulled by measurable changes in mission consequence, utilization, and evidence expectations.
Cost, Downtime, and Qualification Pressure
Three converging pressures make “unknown electrical faults” prohibitively expensive in heavy-lift programs:
Higher mission consequence: higher payload value and third-party liability exposure
Higher utilization: shifting from hobbyist cycles to rigorous industrial duty cycles
Higher evidence expectations: the need for professional qualification artifacts and transport compliance
Transport Compliance as a Reliability Signal
While UN 38.3 is the mandatory baseline for lithium battery shipping, its value in heavy-lift programs extends beyond legal compliance. Intertek summarizes UN 38.3 and the test categories T1–T8 (altitude, thermal, vibration, shock, short circuit, impact, overcharge, forced discharge) in its UN 38.3 testing overview.
It’s worth treating specific test categories as practical reliability proxies:
T3 (vibration): validates the physical integrity of sense-wire harnesses, connector seating, and fastener/torque stability over long-term operations
T5 (external short circuit): benchmarks the millisecond-level isolation response of the BMS under severe electrical stress
For industrial buyers, these tests are often part of the minimum evidence bar used to qualify hardware robustness.
Ultimately, a redundant architecture helps ensure that when a fault occurs, the system remains a controlled, auditable asset rather than an untraceable liability.
Rising Diagnostic Expectations
Beyond safety, redundancy has become an operations feature. Fleet teams want diagnosable power systems that reduce “swap and hope” maintenance. In practice, that means:
Clear isolation events: what opened, when, and why
High-fidelity telemetry: current and temperature history synchronized around transitions
Fault-classification confidence: distinguishing transient connector noise from genuine cell degradation
This is one reason redundancy is becoming a default requirement in the 100kg+ class: it turns the battery from a passive component into an active fleet management tool.
Next steps (evaluation checklist)
If you’re comparing approaches for a 100–200kg class platform, a practical next step is to request (or define) a single “evidence package” that makes architectures comparable:
Electrical architecture diagram showing isolation elements (contactor/ideal-diode/ORing concept) and backfeed prevention paths
BMS fault dictionary + isolation policy (what trips, what latches, what recloses)
CAN event/log spec (fields, timing, retention)
Current-sharing and thermal test results under representative duty cycles
Transport and compliance documentation scope (e.g., UN 38.3 test summary/report availability)
To access detailed technical documentation on industrial power reliability, BMS monitoring protocols, and multi-pack configuration benchmarks, we welcome you to consult the Herewin technical team. Our engineering experts can provide the necessary baseline references and integration guidance tailored to your specific heavy-lift UAV program.